Robotbegränsningar
| Beskrivning |
Robotbegränsningar begränsar allmänna robotrörelser.
Säkerhetsgränserna begränsar krafter och rörelser vid verktygsflänsen och mitten av de två användardefinierade verktygspositionerna
|
| Hastighetsgränser | 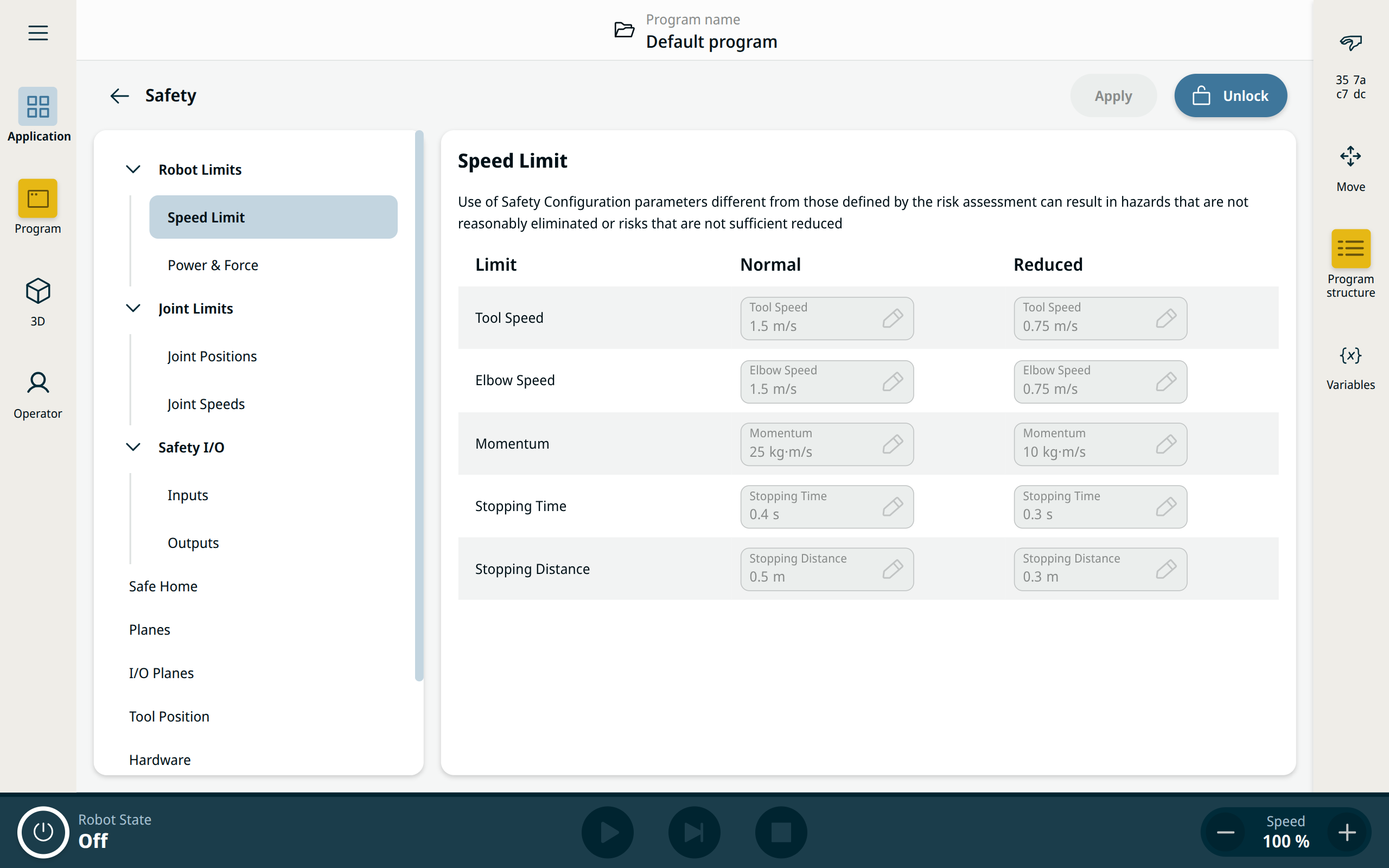
Begränsning av stopptid och avstånd påverkar den totala robothastigheten. Om till exempel stopptiden är inställd på 300 ms begränsas den maximala robothastigheten så att roboten kan stanna inom 300 ms.
|
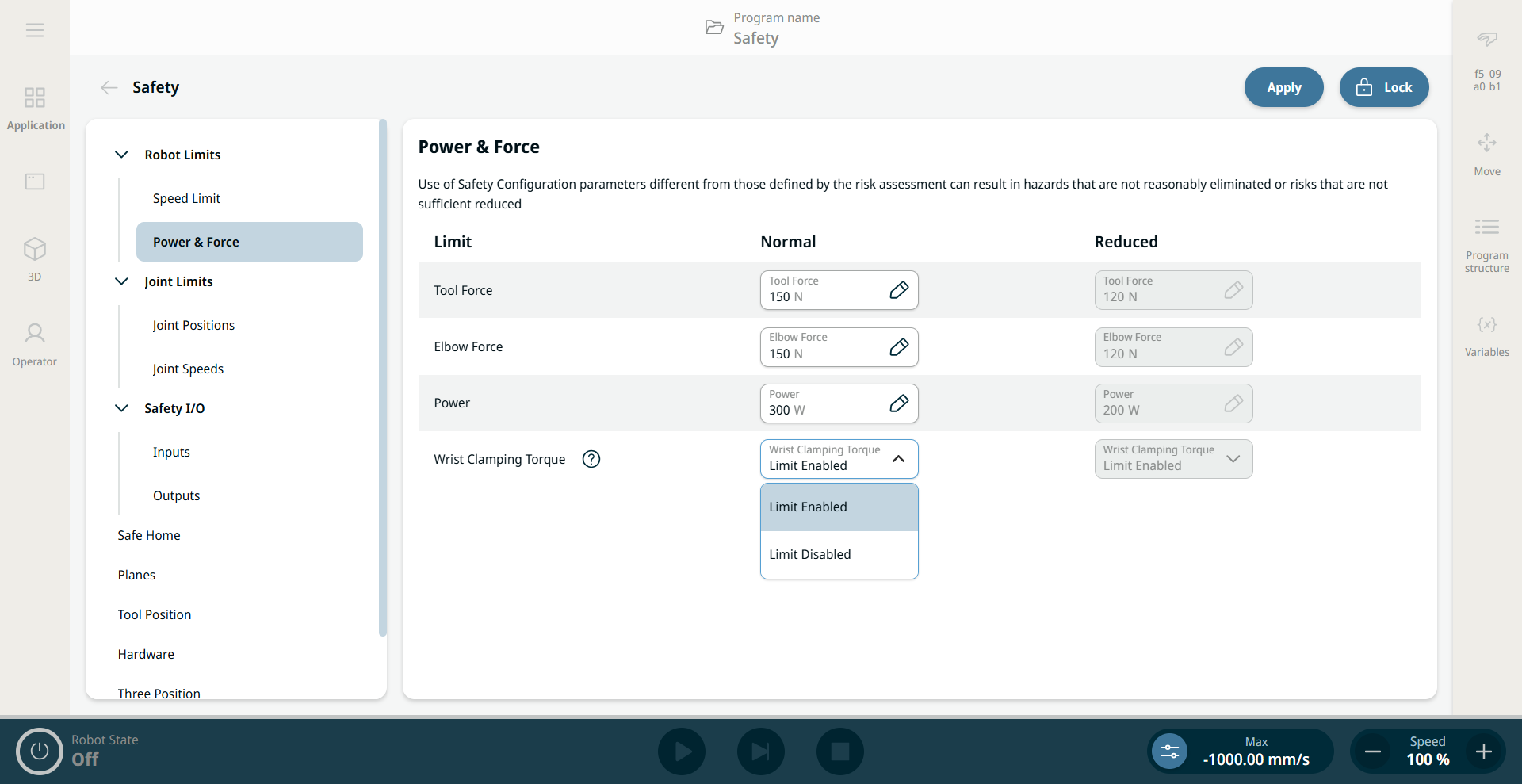
| Ström och kraft |
Verktygs- och armbågskrafterna kan överskridas av de tre handledslederna om säkerhetsfunktionen ”handledens klämmoment” är inaktiverad
|