Maximal nyttolast
| Beskrivning |
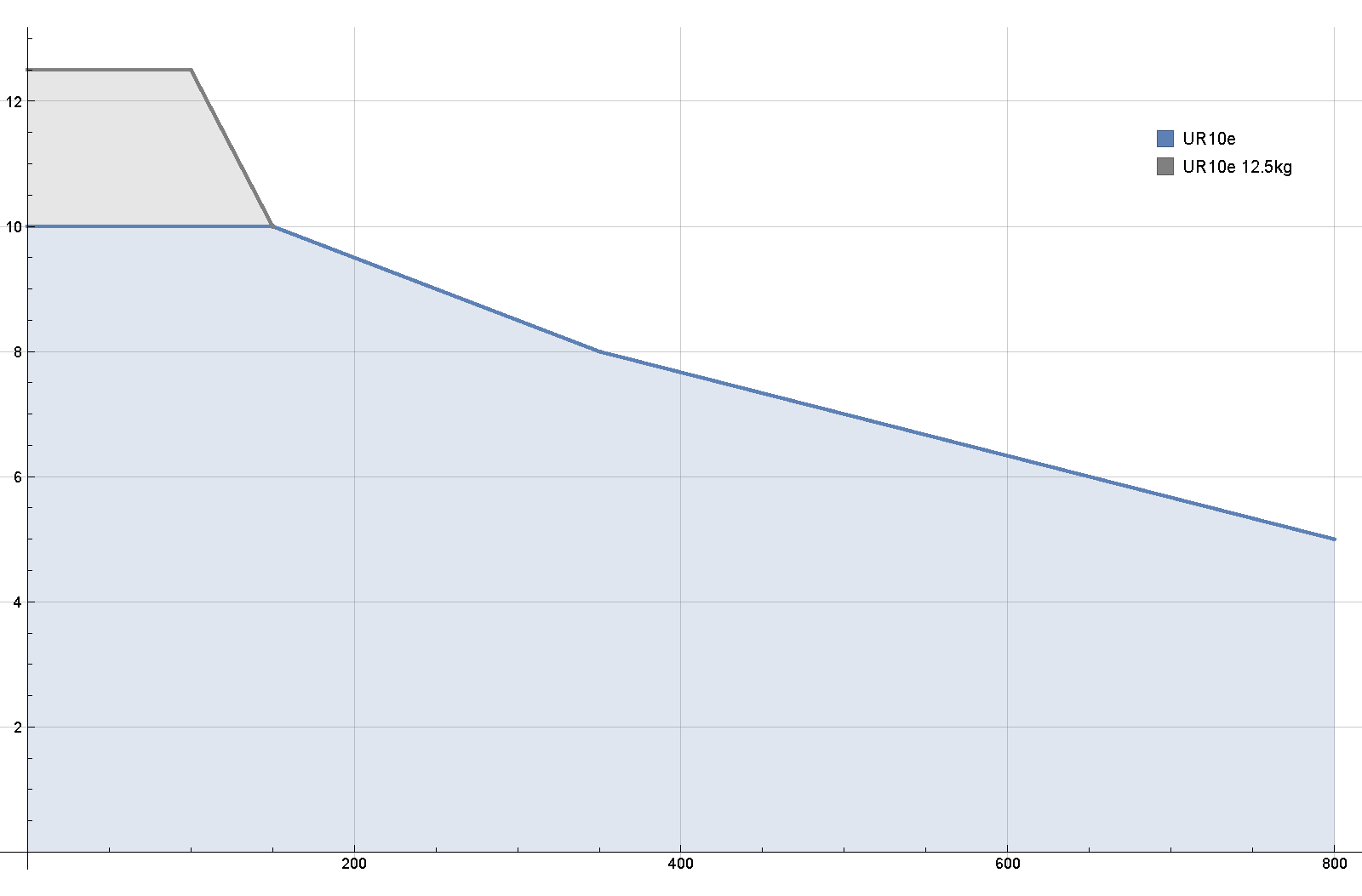
Den nominella nyttolasten för robotarmen beror på nyttolastens förskjutning av tyngdpunkten (CoG), enligt nedan. Förskjutningen av tyngdpunkten definieras som avståndet mellan mittpunkten för verktygets fläns och nyttolastens tyngdpunkt.
Robotarmen kan hantera en lång tyngdpunktsförskjutning om nyttolasten placeras under verktygsflänsen. När du till exempel beräknar nyttolastens massa i en plock- och placeringsapplikation måste du ta hänsyn till både gripdonet och arbetsstycket.
Robotens accelerationsförmåga kan minskas om nyttolastens tyngpunkt överstiger robotens räckvidd och nyttolast. Du kan kontrollera räckvidden och nyttolasten för din robot i de tekniska specifikationerna.
|
| UR10e10 kg / 12,5 kg |
Verifiera robotens nyttolastkapacitet genom att kontrollera etiketten på robotarmen. Nyttolaster över 10 kg sträcks ut horisontellt bort från armbågsleden. En ökning av den maximala lastkapaciteten kan leda till att roboten rör sig i lägre hastigheter och med lägre acceleration. Förflyttning med hög nyttolast sker med verktyget riktat vertikalt nedåt, vilket ofta är fallet i palleteringsapplikationer.
|
|
|
Förhållandet mellan förväntad nyttolast och tyngdpunktsförskjutning.
|
| Nyttolastens tröghet |
Du kan konfigurera nyttolaster med hög tröghet, om nyttolasten är korrekt inställd. Manöverenhetens programvara justerar automatiskt accelerationen när följande parametrar är korrekt konfigurerade:
Det går att använda URSim för att analysera robotrörelsens acceleration och cykeltid vid särskilda nyttolaster.
|