Varnostni V/I
| Opis |
V/I so porazdeljeni med vhode in izhode in so seznanjeni, tako da vsaka funkcija zagotavlja zmogljivost Kategorije 3 PLd.
Ko zaženete program iz V/I ali vhoda vmesnika fieldbus, lahko robot začne gibanje iz trenutnega položaja, zahtevano ni nobeno ročno premikanje do prve smerne točke prek vmesnika PolyScope.
|
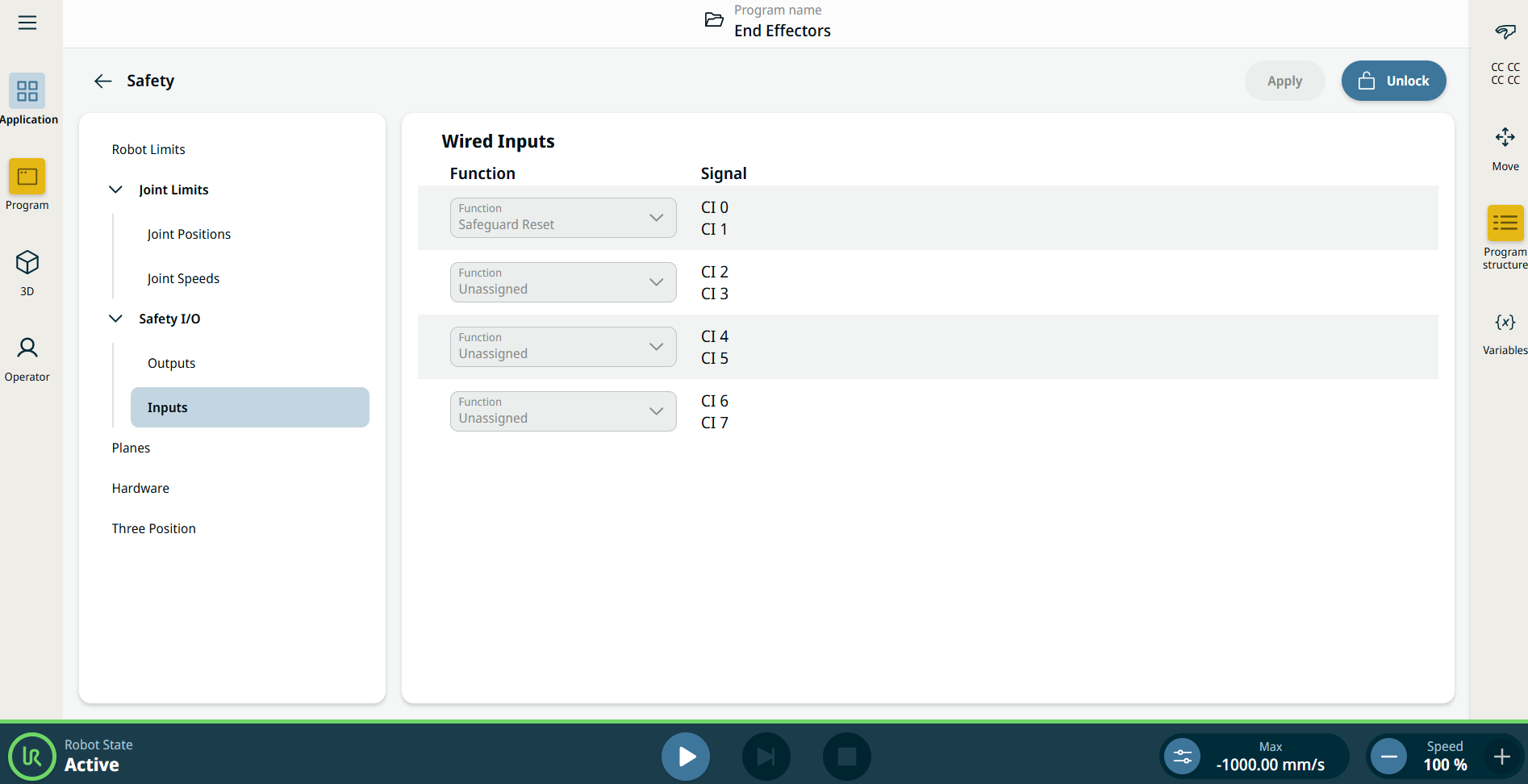
| Vhodi krmilne omarice |
Vhodi so opisani v tabeli spodaj:
Ko je privzeta ponastavitev zaščite onemogočena, se samodejna ponastavitev izvede, ko varovalo ne sproži več zaustavitve. To se lahko zgodi v primeru, če oseba prečka področje varnostne naprave. Če varovalo osebe ne zazna in je oseba izpostavljena nevarnostim, je samodejna ponastavitev s standardi prepovedana.
Ko je omogočena preventivna zaustavitev v Samodejnem načinu, preventivna zaustavitev ni sprožena v Ročnem načinu.
|
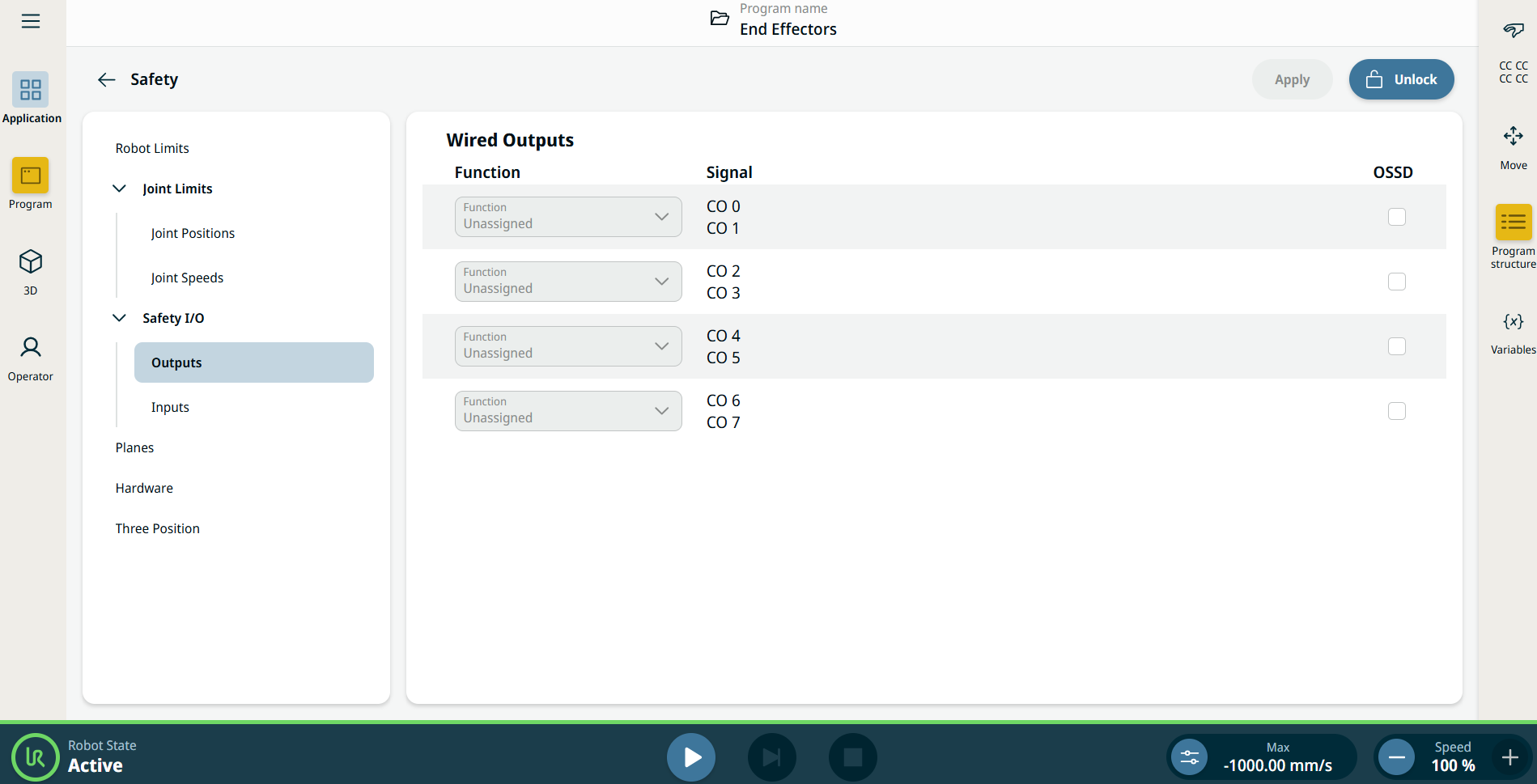
| Izhodi krmilne omarice |
Vsi varnostni izhodi se znižajo v primeru kršitve ali okvare varnostnega sistema. To pomeni, da izhod Zaustavitve sistema sproži zaustavitev, tudi če zaustavitev v sili ni sprožena. Izhodne signale lahko uporabljate s temi varnostnimi funkcijami. Vsi signali se vrnejo v nizko stanje, ko se konča stanje, ki je sprožilo visoki signal:
Kateri koli zunanji stroji, ki prejmejo stanje Ustavitve v sili od robota preko izhoda Zaustavitve sistema, morajo biti skladni z ISO 13850. To je še posebej potrebno pri namestitvah, kjer je vhod Zaustavitev robota v sili povezan z zunanjo napravo za ustavitev v sili. V takih primerih se izhod Zaustavitve sistema aktivira, ko se sprosti zunanja naprava za ustavitev v sili. To pomeni, da bo stanje ustavitve v sili na zunanjem stroju ponastavljeno brez potrebe po ročnem upravljanju operatorja stroja. Zato mora, za ohranitev skladnosti s standardi varnosti, zunanji stroj pred nadaljevanjem zahtevati ročno posredovanje.
|