Prvi zagon
| Opis |
Prvi zagon je začetno zaporedje dejanj, ki jih lahko izvedete z robotom po končanem sestavljanju. Zahtevani koraki začetnega zaporedja dejanj:
|
|
Če pred zagonom robotove roke ne preverite obremenitve in namestitve, lahko pride do poškodb osebja in/ali materialne škode.
Nepravilne nastavitve obremenitve in namestitve lahko preprečijo pravilno delovanje robotove roke in krmilne omarice.
Zagon robota pri nižjih temperaturah lahko povzroči nižjo zmogljivost ali zaustavitve zaradi viskoznosti olja in masti, ki je odvisna od temperature.
|
Vklop robota
| Vklop robota |
Vklop robota vklopi krmilno omarico in naloži prikaz na zaslonu CP.
|
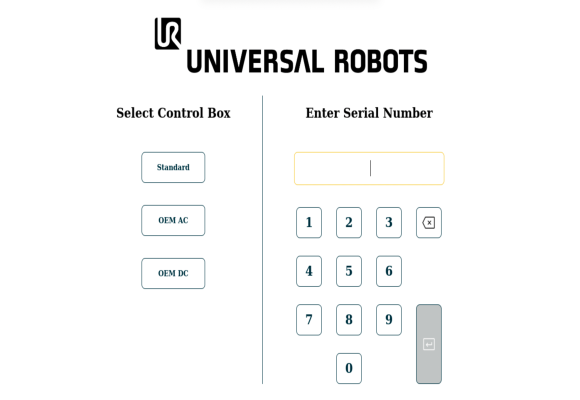
Vstavljanje serijske številke
| Postopek vstavljanja serijske številke |
Ko prvič namestite robota, morate vnesti serijsko številko na robotovi roki. Ta postopek je potreben tudi pri vnovični namestitvi programske opreme. Na primer pri nameščanju programske opreme. |
|
|
Nalaganje začetnega zaslona lahko traja nekaj minut.
|
Zagon robotove roke
| Za zagon robota |
Zagon robotove roke izklopi zavorni sistem, da lahko začnete premikati robotovo roko in začnete uporabljati PolyScope X.
|


Ko se stanje robotove roke spremeni iz stanja nedejavnosti v normalno, se podatki senzorja preverijo glede na konfigurirano namestitev robotove roke. Če je montaža preverjena, se dotaknite START, da nadaljujete s sproščanjem vseh zavor členov in pripravite robotovo roko za uporabo.
|

Zaustavitev robota
| Postopek izklopa robotove roke |
Nepričakovani zagon in/ali gibanje lahko povzročita poškodbe.
Sedaj lahko:
|