Bezpečnostné V/V
| Popis |
Vstupy a výstupy sú rozdelené medzi vstupy a výstupy a sú spárované tak, aby každá funkcia poskytovala možnosť PLd kategórie 3.
Pri spúšťaní programov zo vstupu V/V alebo zbernice môže robot začať pohyb z pozície, ktorú má, nebude potrebný žiadny manuálny pohyb k prvému traťovému bodu cez PolyScope.
|
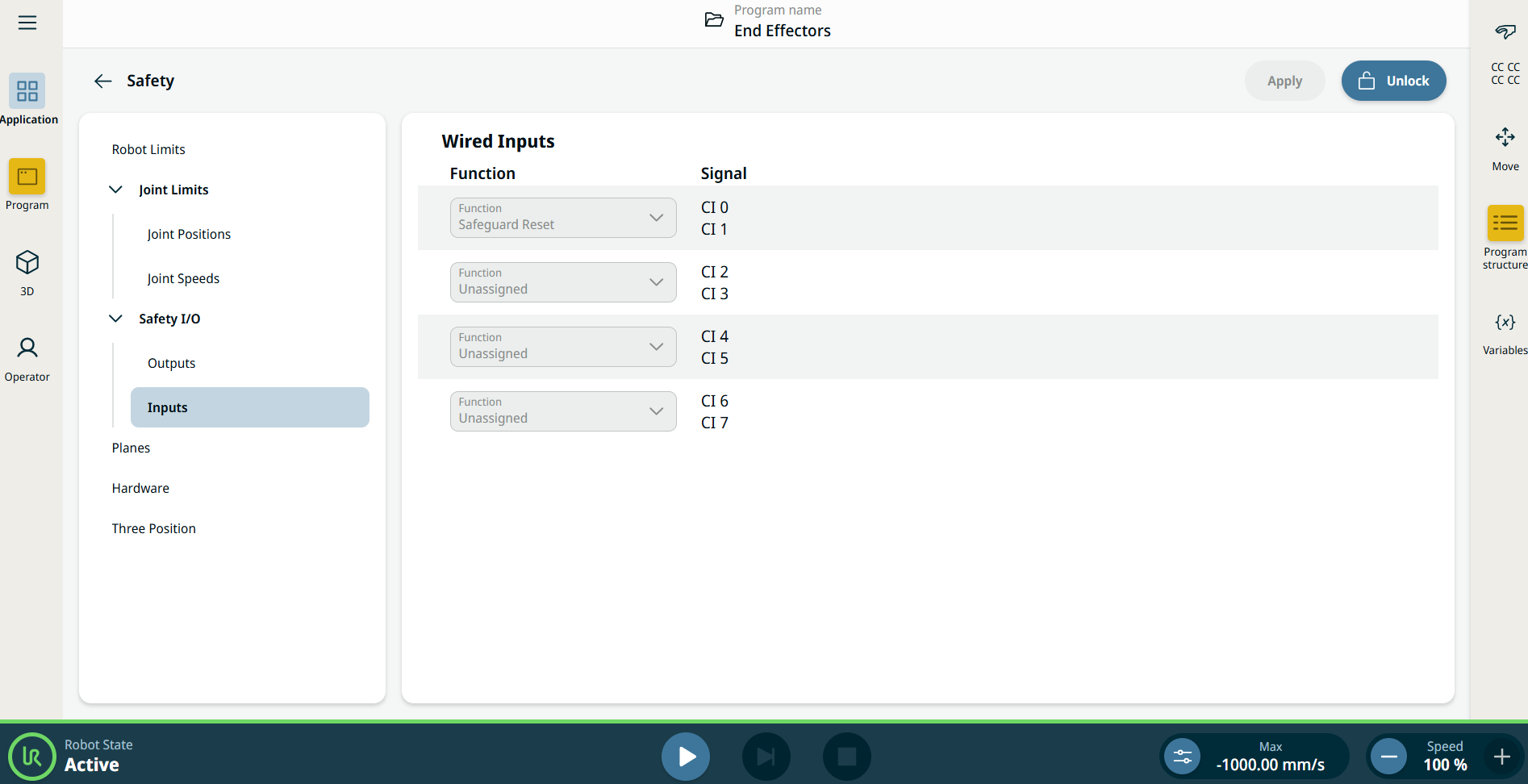
| Riadiaca skrinka Vstupy |
Vstupy sú popísané v nasledujúcej tabuľke:
Keď je predvolené vynulovanie ochranného opatrenia vypnuté, dôjde k automatickému vynulovaniu, keď ochranné opatrenie už nespustí zastavenie. To sa môže stať, ak osoba prejde cez ochranné pole. Ak osoba nie je detekovaná ochranným zariadením a je vystavená nebezpečenstvu, automatický reset je podľa noriem zakázaný.
Keď je zapnutá funkcia ochranného zastavenia v automatickom režime, ochranné zastavenie sa v manuálnom režime nespustí.
|
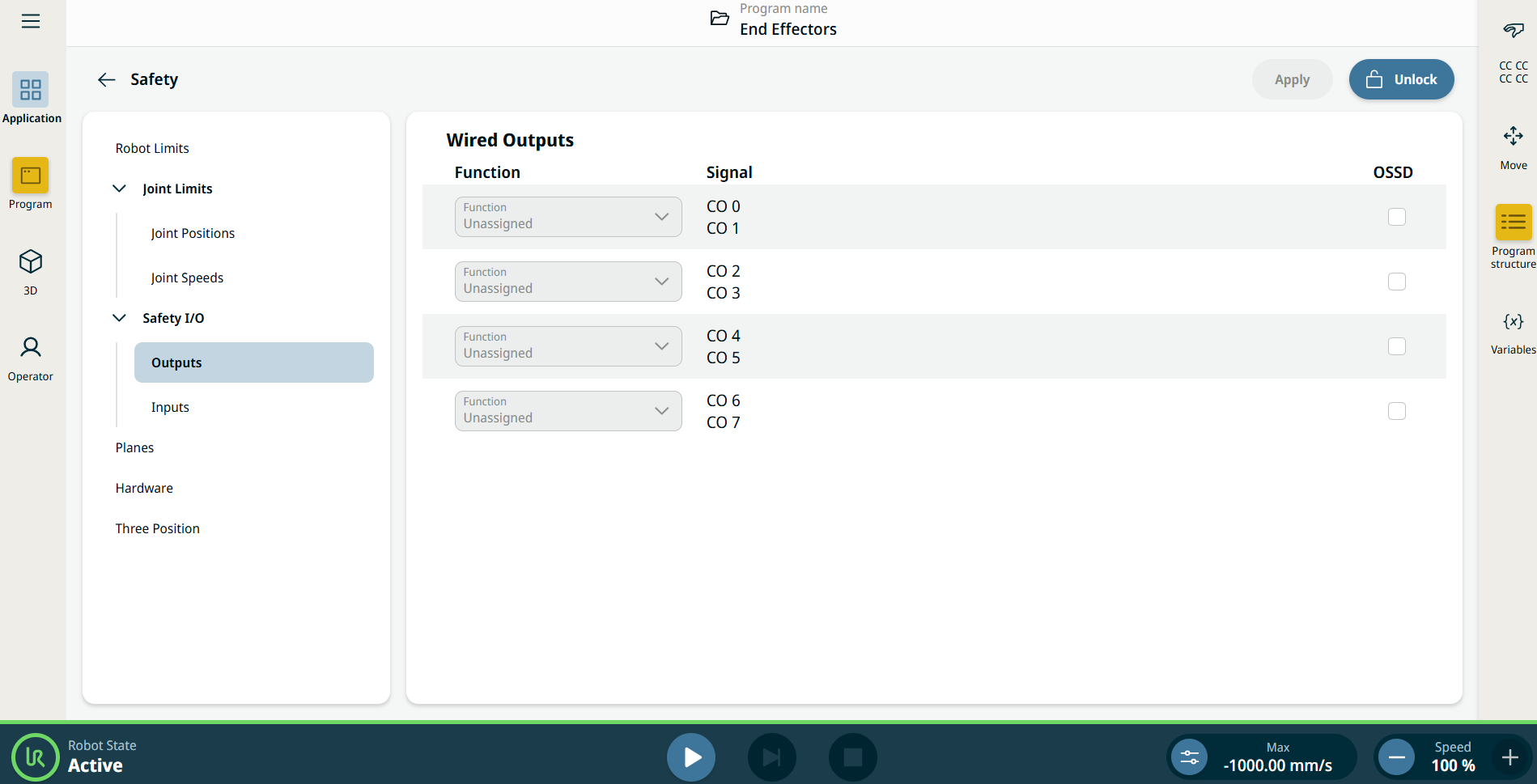
| Výstupy riadiacej skrinky |
Všetky bezpečnostné výstupy sa znížia v prípade porušenia alebo poruchy bezpečnostného systému. To znamená, že výstup zastavenia systému spustí zastavenie aj vtedy, keď sa nespustí núdzové zastavenie. Môžete použiť nasledujúce bezpečnostné funkcie výstupných signálov. Keď sa stav, ktorý spustil vysoké signály skončí, všetky signály sa vrátia na nízke:
Externý mechanizmus, ktorý z robota prijíma stav Núdzového zastavenia cez výstup zastavenia systému, musí byť v súlade s normou ISO 13850. Je to obzvlášť potrebné pri nastaveniach, kde je vstup Núdzového zastavenia robota pripojený k externému zariadeniu núdzového zastavenia. V takých prípadoch sa po uvoľnení externého zastavenia systému vstup Núdzového zastavenia systému zmení na vysoký. Z toho vyplýva, že stav núdzového zastavenia externého mechanizmu sa zresetuje bez manuálneho zásahu osoby, ktorá robot obsluhuje. Preto treba na dodržanie bezpečnostných noriem externý mechanizmus znovu zapnúť ručne.
|