Obmedzenie polohy nástroja
| Podrobnosti |
Poloha nástroja má dve kľúčové výhody:
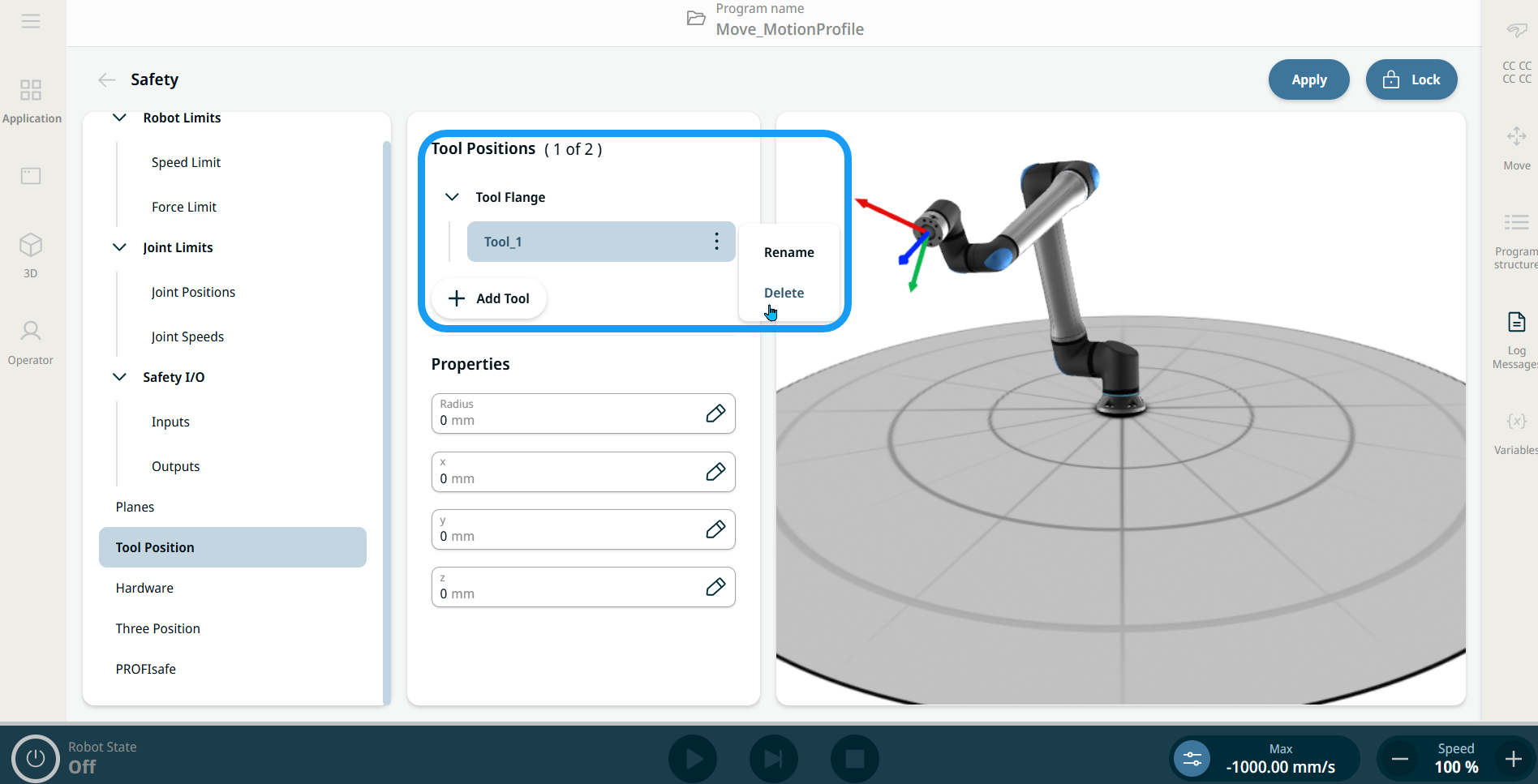
Môžete definovať, konfigurovať a spravovať až dve polohy nástrojov.
|
| Nástroje definované používateľom |
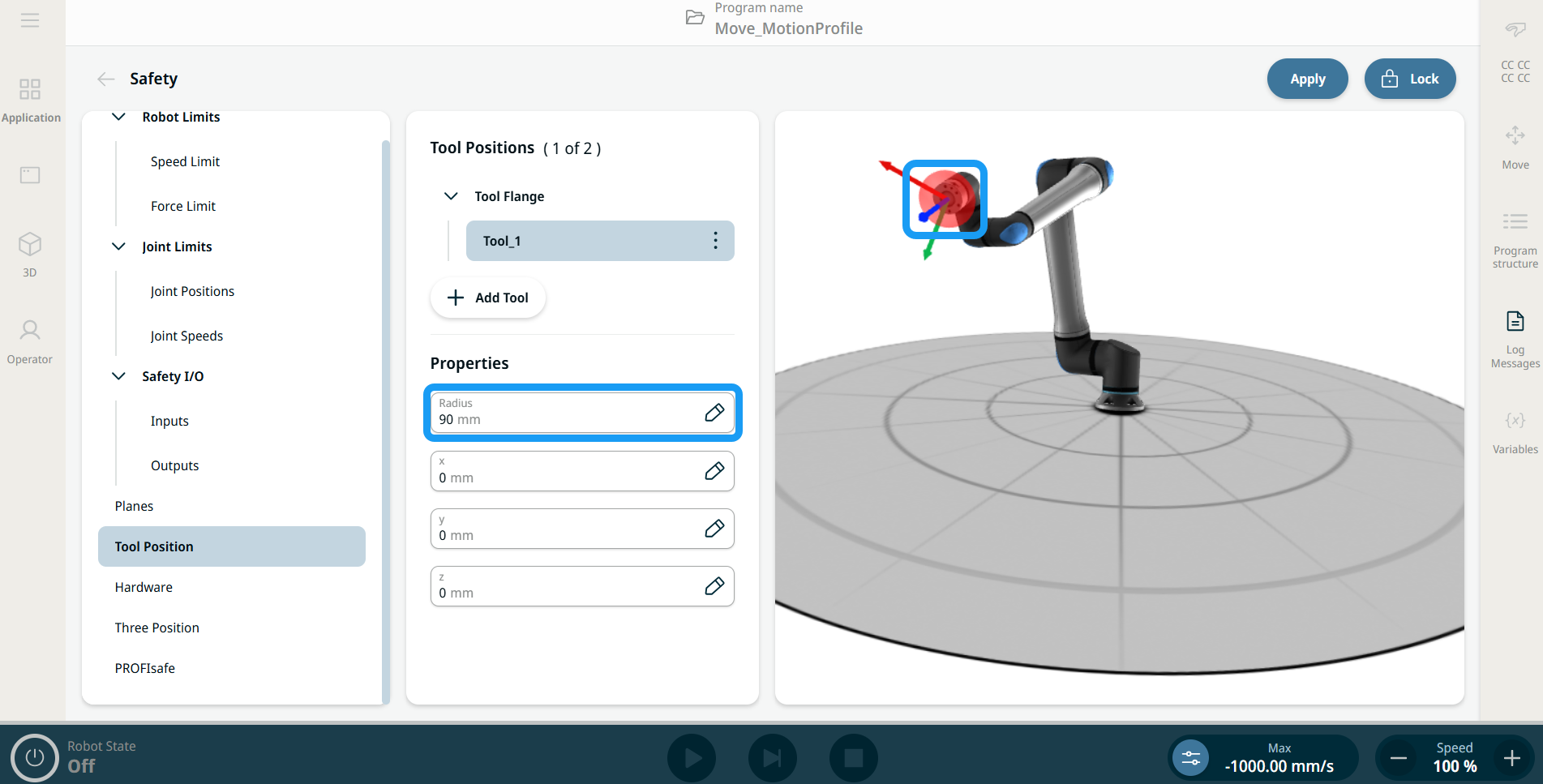
V prípade nástrojov definovaných používateľom môže používateľ zmeniť:
|
|
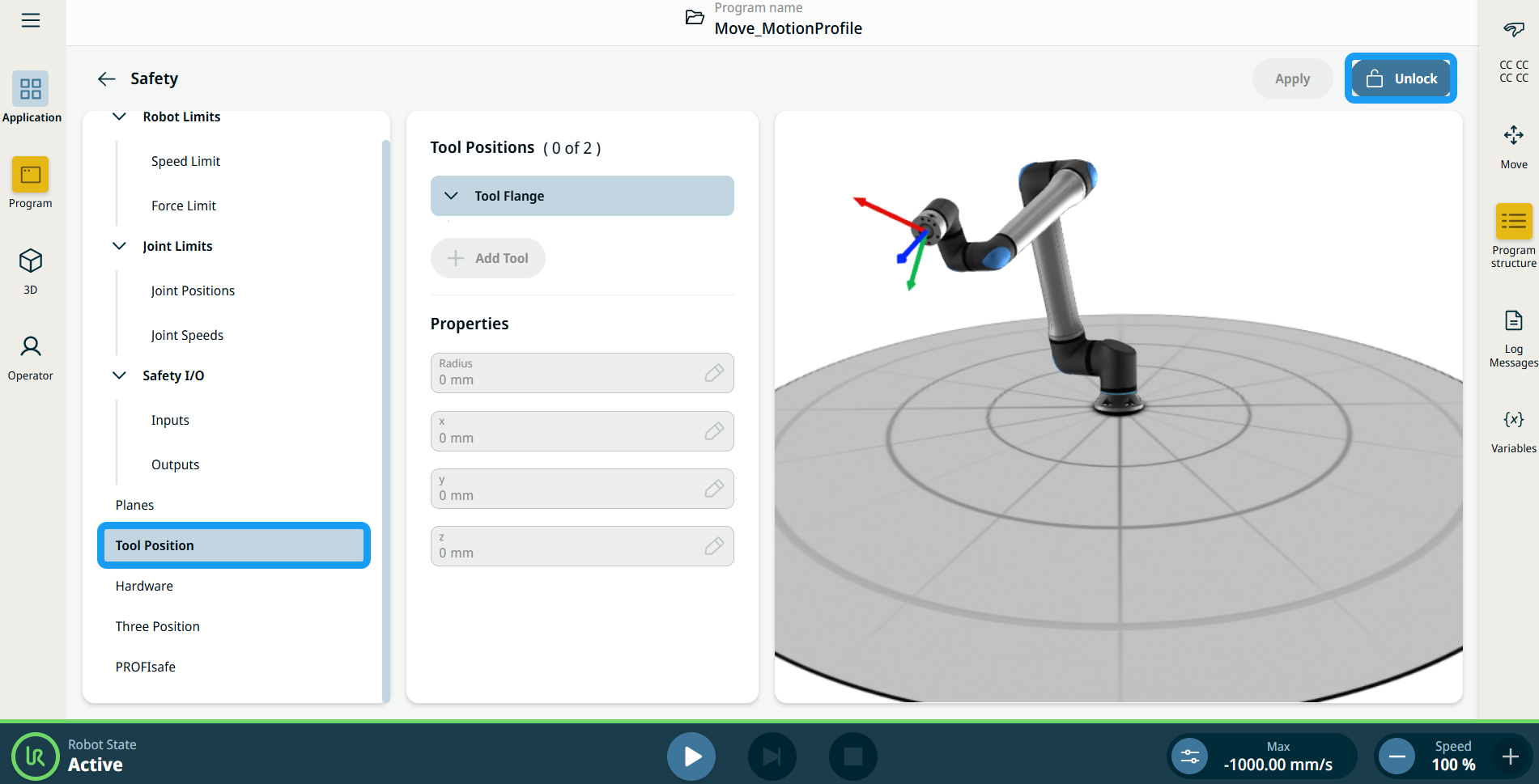
Prístup k polohe nástroja |
|
|
|
|
|
|
|