Dimenzovanie stojana
| Popis |
Konštrukcia (stojan), na ktorej je rameno robota namontované, je dôležitou súčasťou inštalácie robota. Stojan musí byť stabilný a bez akýchkoľvek vibrácií z vonkajších zdrojov.
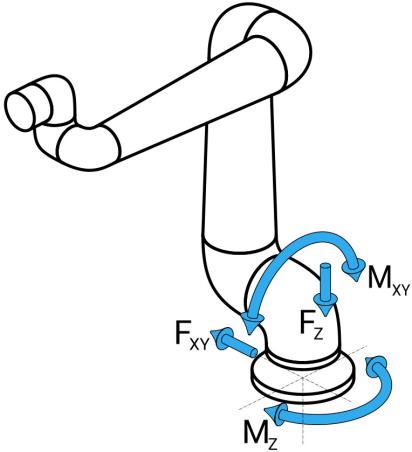
Každý kĺb robota vytvára krútiaci moment, ktorý pohybuje a zastavuje rameno robota. Počas bežnej neprerušovanej prevádzky a pri zastavení pohybu sa krútiace momenty kĺbov prenášajú na stojan robota ako:
Sila a moment pri definícii základnej príruby. |
|
Dimenzovanie stojana |
Veľkosť zaťaženia závisí od modelu robota, programu a viacerých ďalších faktorov. Dimenzovanie stojana musí zohľadňovať zaťaženie, ktoré rameno robota vytvára počas bežnej neprerušovanej prevádzky a počas zastavenia kategórie 0, 1 a 2.
Počas pohybu pri zastavení môžu kĺby prekročiť maximálny menovitý prevádzkový krútiaci moment. Zaťaženie počas zastavovacieho pohybu je nezávislé od typu kategórie zastavenia. Hodnoty uvedené v nasledujúcich tabuľkách sú maximálne menovité zaťaženia pri najhorších pohyboch vynásobené bezpečnostným faktorom 2,5. Skutočné zaťaženie neprekročí tieto hodnoty.
Maximálne krútiace momenty kĺbov pri zastavení kategórie 0, 1 a 2.
Maximálne krútiace momenty kĺbov počas bežnej prevádzky.
Bežné prevádzkové zaťaženie možno vo všeobecnosti znížiť znížením medzných hodnôt zrýchlenia kĺbov. Skutočné prevádzkové zaťaženie závisí od aplikácie a programu robota. Pomocou programu URSim môžete vyhodnotiť očakávané zaťaženie vo vašej konkrétnej aplikácii. |
Bezpečnostné rezervy |
Do konštrukcie môžete zahrnúť dodatočné bezpečnostné rezervy, pričom zohľadníte nasledujúce aspekty:
|