Trajetórias de união
| Descrição |
Mistura permite que o robô faça uma transição suave entre duas trajetórias, sem parar no waypoint entre eles. Assim, o programa do seu robô será executado mais rapidamente.
|
|
Trajetórias de união |
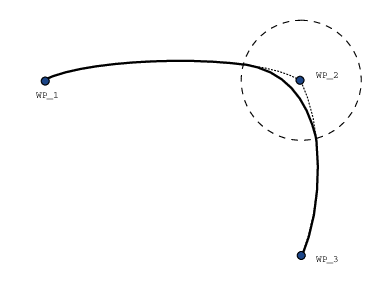
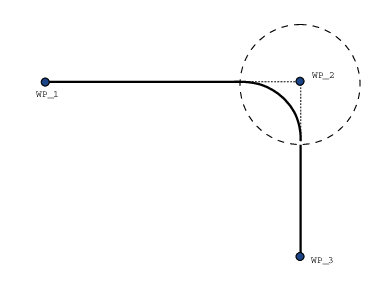
46.12: Espaço articular (MoveJ) vs. espaço cartesiano (MoveL) movimento e mistura. |
|
|
Dependendo do tipo de movimento (MoveL, MoveJ ou MoveP), diferentes trajetórias de união são geradas.
|