|
É possível evitar os riscos de entalamento removendo os obstáculos nessas áreas, colocando o robô de forma diferente ou utilizando uma
combinação de planos de segurança e limites da articulação para eliminar os perigos, impedindo que o robô se desloque para esta área do seu espaço de trabalho.
A colocação do robô em determinadas áreas pode criar riscos de entalamento, que podem provocar lesões.
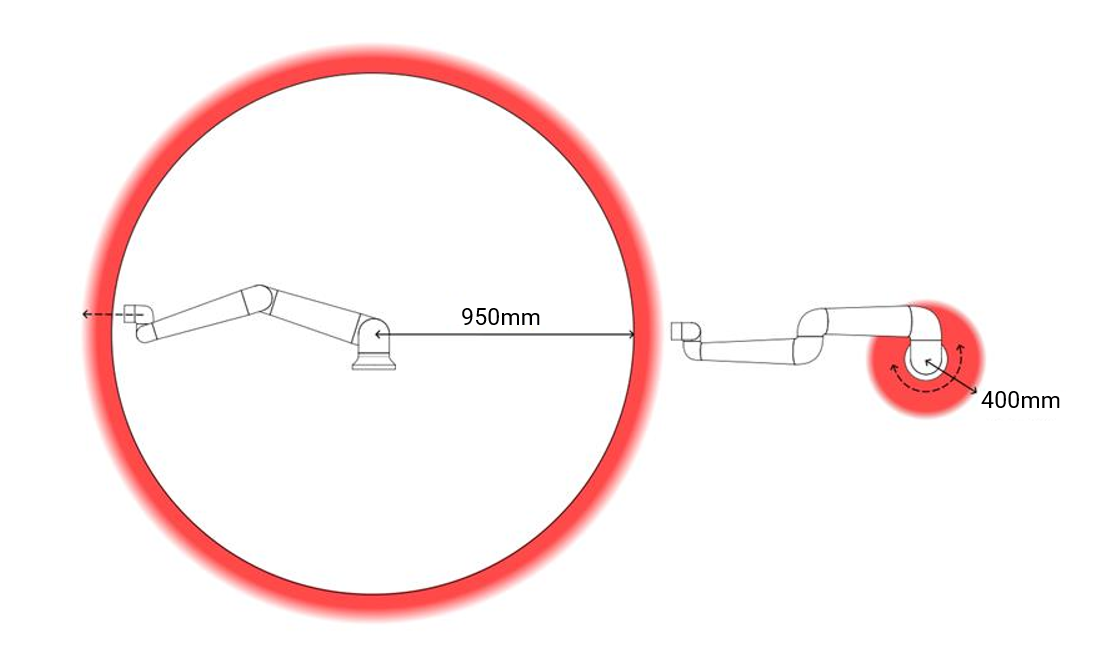
Devido às propriedades físicas do braço robótico, certas áreas de trabalho requerem atenção em relação a perigos de beliscão.
Uma área (esquerda) é definida para movimentos radiais quando a articulação do pulso 1 está a pelo menos 950 mm da base do robô.
A outra área (direita) está a 400 mm da base do robô, quando se move tangencialmente.
|