Joint Move
| Descrição |
The Joint Move works in a similar way to Move to command, but it supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. O movimento pode não ser uma linha direta entre A e B, mas ideal para a posição inicial das articulações e a posição final das articulações. Joint Move makes movements that are calculated in the robot arm joint space. As articulações são controladas para terminarem os seus movimentos em simultâneo. Este tipo de movimento resulta num caminho curvo para a ferramenta seguir.
|
|
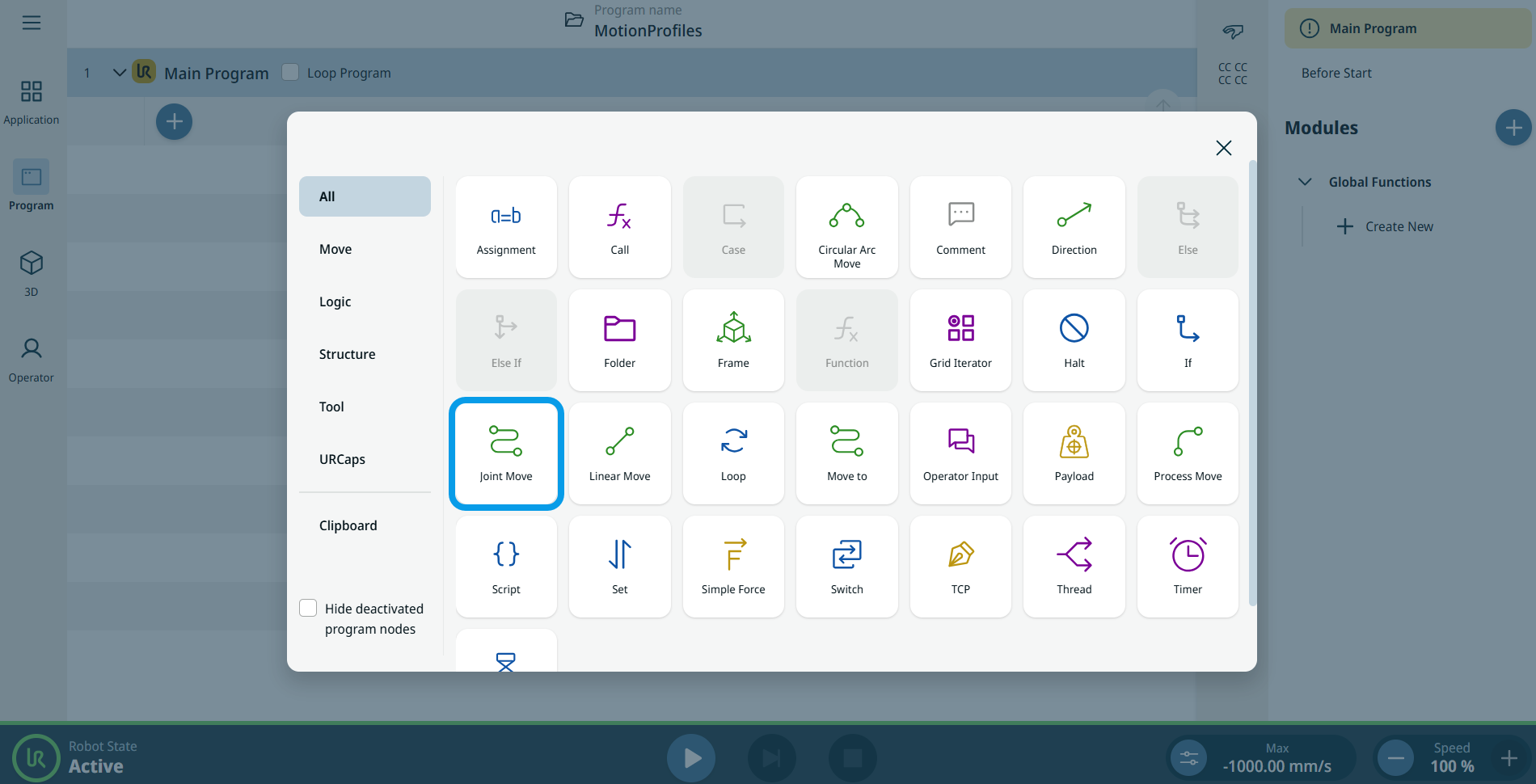
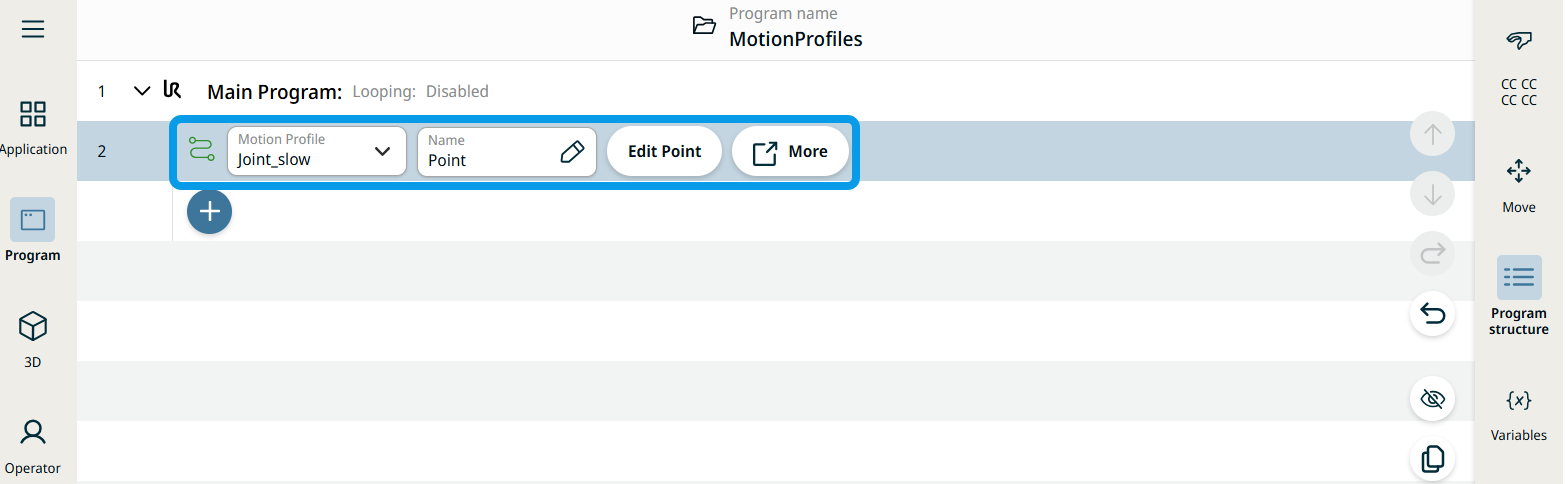
To access Joint Move command |
|
|
|
|
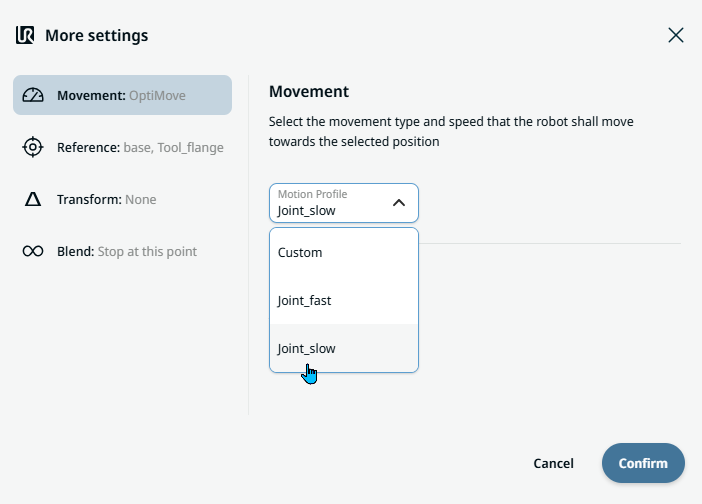
| Movement setting |
|
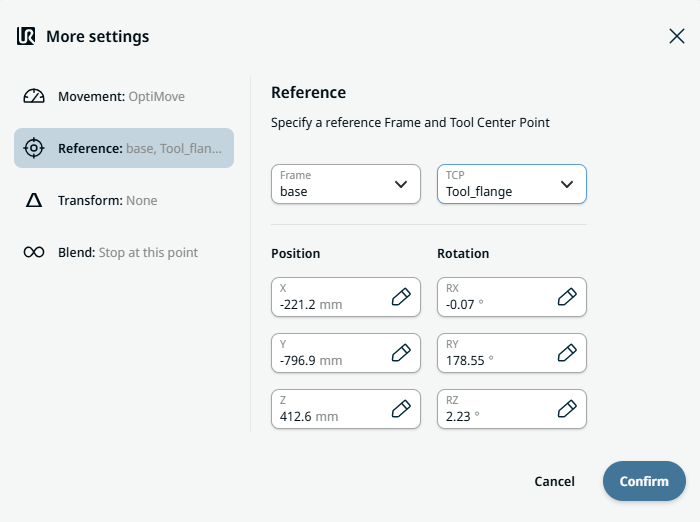
| Reference setting |
|
| Transform setting |
|
|
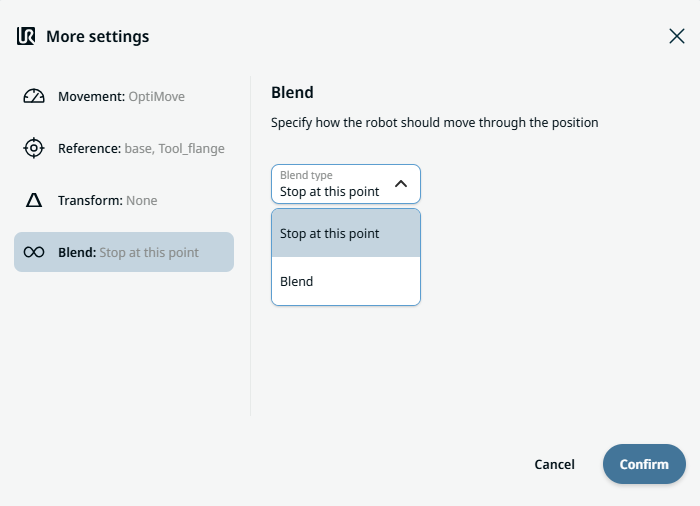
Blend setting |
|