Maksymalne obciążenie użytkowe
| Opis |
Znamionowe obciążenie użytkowe ramienia robota zależy od przesunięcia środka ciężkości (CoG) obciążenia użytkowego, jak pokazano poniżej. Przesunięcie środka ciężkości (CoG) to odległość między środkiem kołnierza narzędzia a środkiem ciężkości przytwierdzonego ładunku.
Ramię robota może obsłużyć większe przesunięcie środka ciężkości, o ile obciążenie znajduje się poniżej kołnierza narzędzia. Na przykład przy obliczaniu masy obciążenia użytkowego w aplikacji typu pick and place należy wziąć pod uwagę zarówno chwytak, jak i obrabiany przedmiot.
Zdolność robota do przyspieszania może ulec zmniejszeniu, jeśli środek ciężkości obciążenia użytkowego przekracza zasięg i obciążalność użytkową danego robota. Zasięg i obciążenie użytkowe robota można sprawdzić w Specyfikacji Technicznej.
|
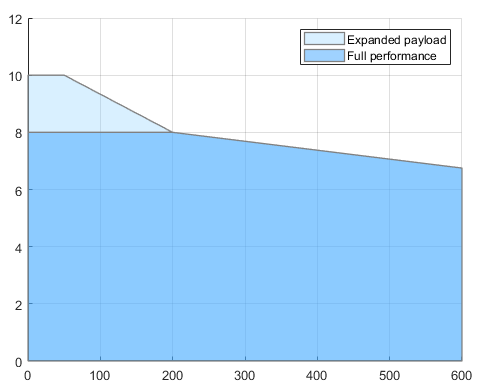
| Krzywa obciążenia
|
Zależność między znamionowym obciążeniem użytkowym a przesunięciem środka ciężkości.
|
| Zwiększenie obciążalności użytkowej |
Ramię robota może obsłużyć większe obciążenia użytkowe i większe przesunięcie środka ciężkości, o ile ładunek zostanie umieszczony poniżej kołnierza narzędzia. Maksymalne obciążenie użytkowe ramienia robota można zwiększyć pod następującymi warunkami:
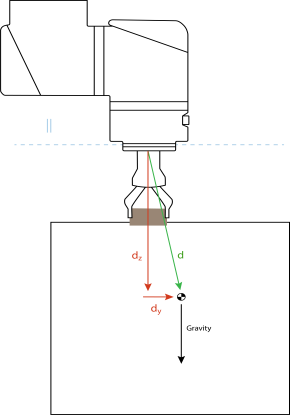
Przykład obliczania poziomego przesunięcia środka ciężkości.
Jak pokazano powyżej, poziome przesunięcie obciążenia użytkowego dy powinno mieścić się w krzywej obciążenia użytkowego.
Zwiększenie obciążenia użytkowego jest możliwe dla każdej orientacji montażu robota.
Zwiększenie maksymalnej obciążalności użytkowej może spowodować, że robot będzie poruszał się ze zmniejszoną prędkością i z mniejszym przyspieszeniem. Większe obciążenie przegubów może ograniczyć niektóre ruchy wewnątrz zakresu roboczego robota. Oprogramowanie robota automatycznie uniemożliwia przekraczanie limitów mechanicznych robota. Korzystanie ze zwiększonego zakresu obciążalności użytkowej nie unieważnia gwarancji na tego robota. |
| Bezwładność obciążenia użytkowego |
Możliwe jest skonfigurowanie obciążeń użytkowych o dużej bezwładności, pod warunkiem prawidłowego ustawienia obciążenia użytkowego. Oprogramowanie sterownika automatycznie dostosowuje wartości przyspieszenia, pod warunkiem prawidłowego skonfigurowania następujących parametrów:
Do oceny przyspieszeń i czasów cyklu ruchów robota z określonym obciążeniem można użyć URSim.
|