Płaszczyzna bezpieczeństwa przy użyciu układu
| Opis |
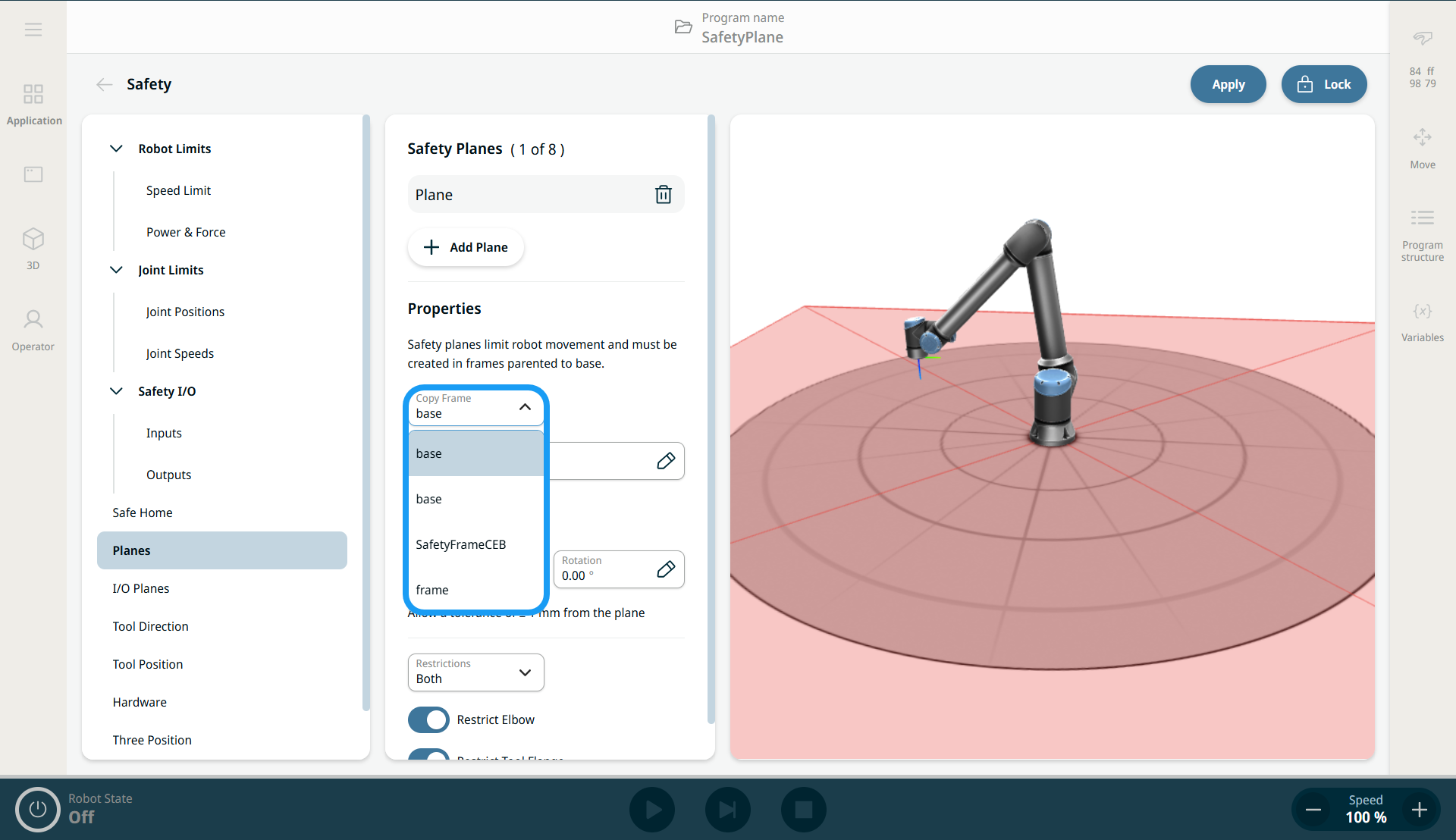
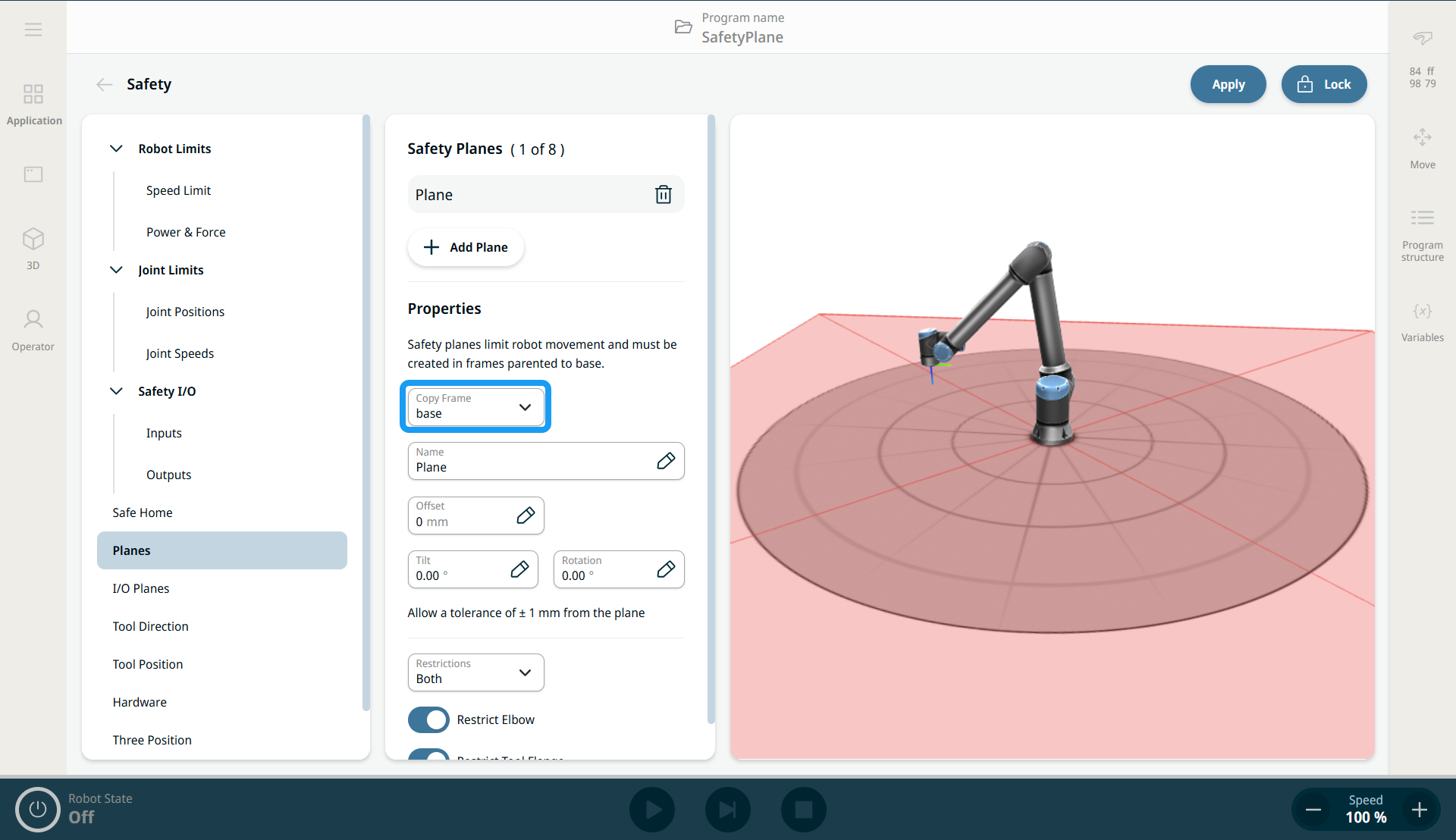
Do zdefiniowania płaszczyzny bezpieczeństwa można użyć istniejącej ramki. Zapewnia to bardziej intuicyjny sposób określania parametrów płaszczyzny na podstawie z góry zdefiniowanej pozycji i obrotu (X, Y, Z, RX, RY, RZ). Wybierz układ w menu rozwijanym Kopiuj układ.
Menu rozwijane Układ kopiuj znajduje się w parametrach definicji płaszczyzny bezpieczeństwa na ekranie Płaszczyzny. Lista ta zawiera ramki zdefiniowane na ekranie Ramki. Po wybraniu ramki jest ona używana jako definicja płaszczyzny bezpieczeństwa. Jeśli określisz parametry przesunięcia, pochylenia i obrotu, zostaną one zastosowane do wybranego układu (zobacz „Konfigurowanie płaszczyzny bezpieczeństwa”). Powstała płaszczyzna bezpieczeństwa łączy wszystkie parametry.
|
|
|
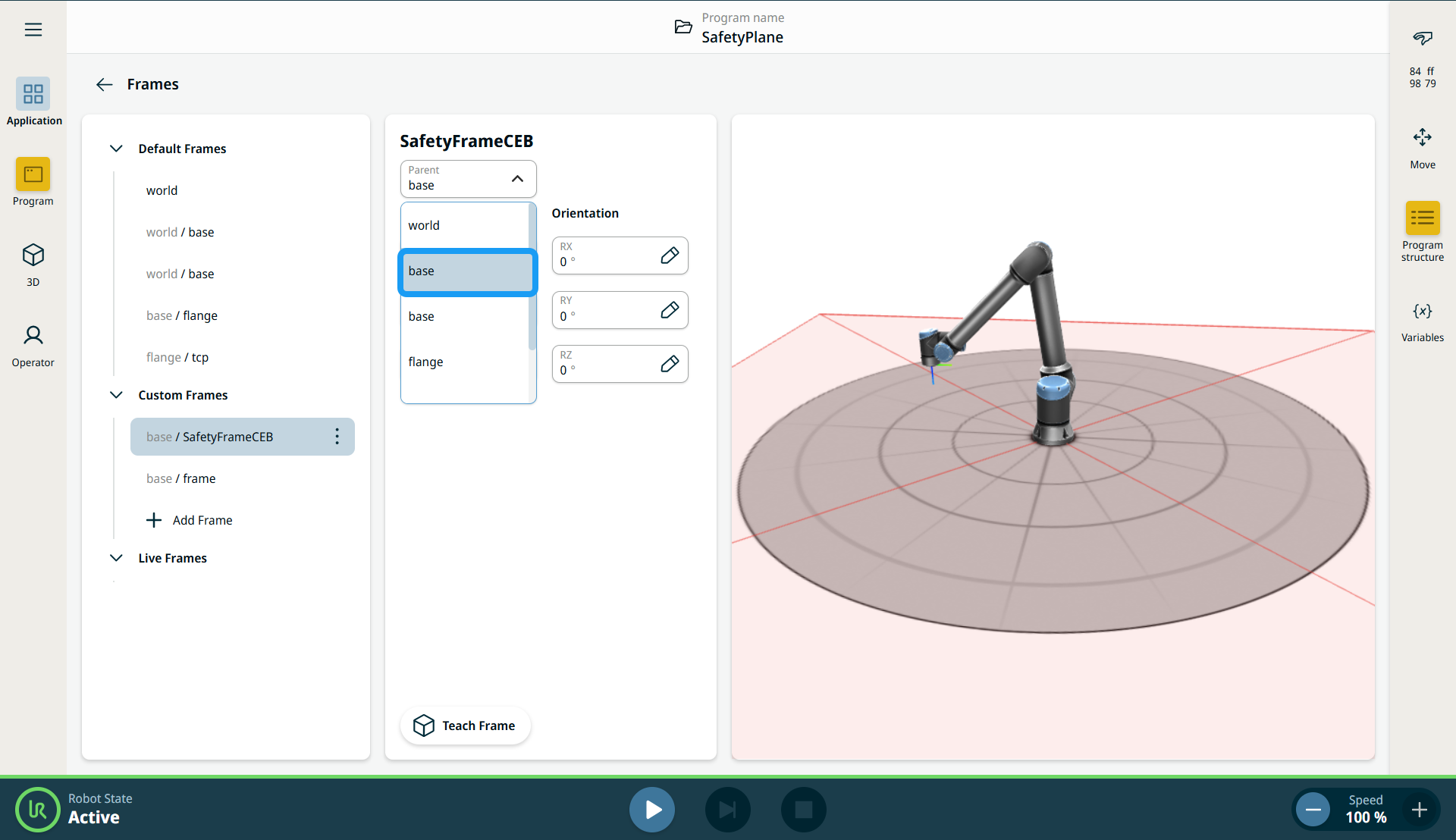
Zobacz sekcję „Układy” w Podręczniku oprogramowania. |
|
Utwórz układ |
|
|
|
Wybierz układ odniesienia w płaszczyźnie bezpieczeństwa |
|
|
|
|
|
|
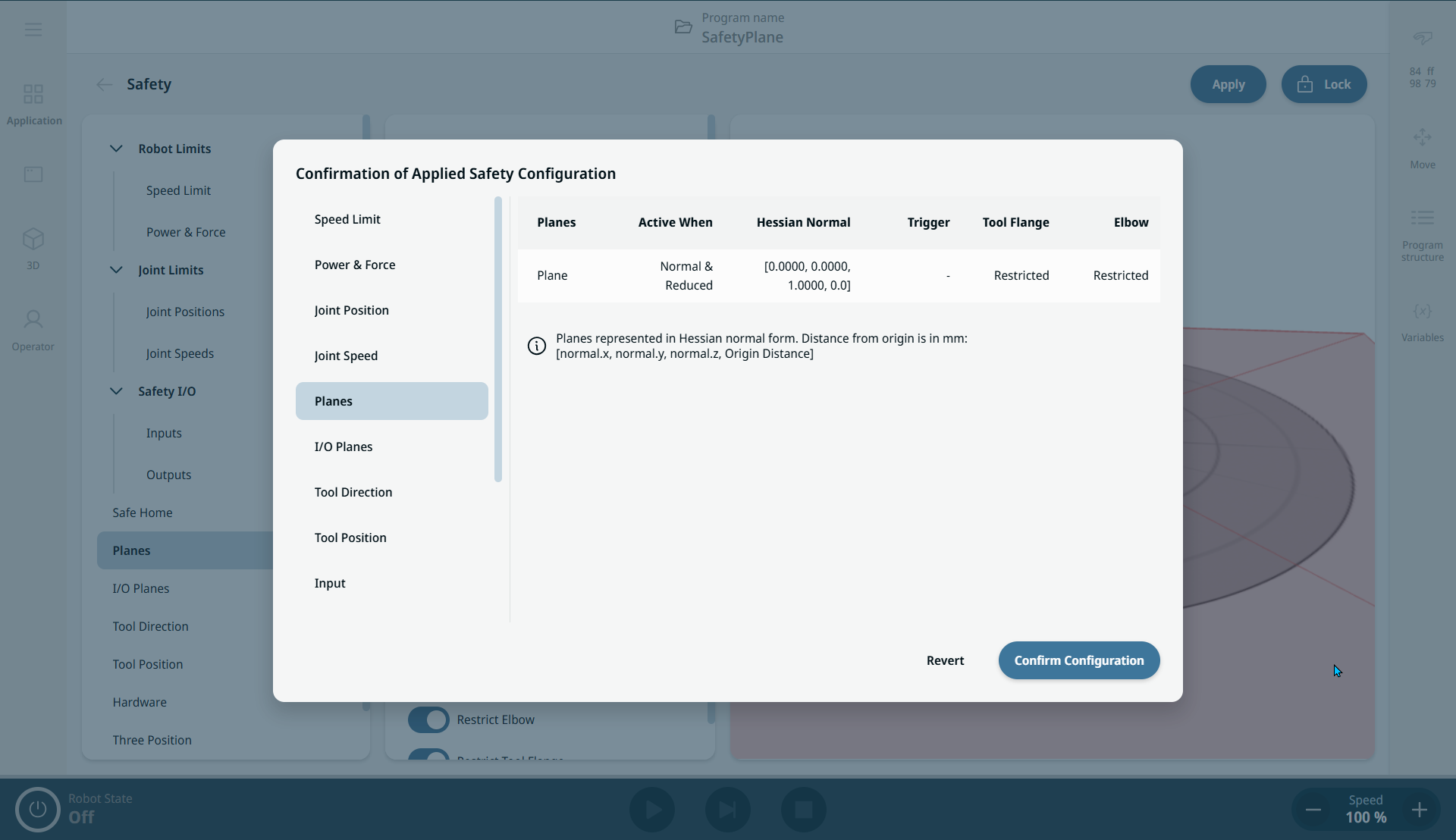
Układ stosowany w płaszczyźnie bezpieczeństwa może być odwrócony w stosunku do tego, czego można by się spodziewać. Jeśli robot znajduje się po stronie naruszającej płaszczyznę, należy dodać odchylenie o 180 stopni. Ograniczenia dotyczące konfiguracji płaszczyzn, ograniczenia przegubu łokciowego oraz ograniczenia kołnierza narzędzia opisano w sekcji „Płaszczyzny bezpieczeństwa”.
|