Bezpieczny dom
| Opis |
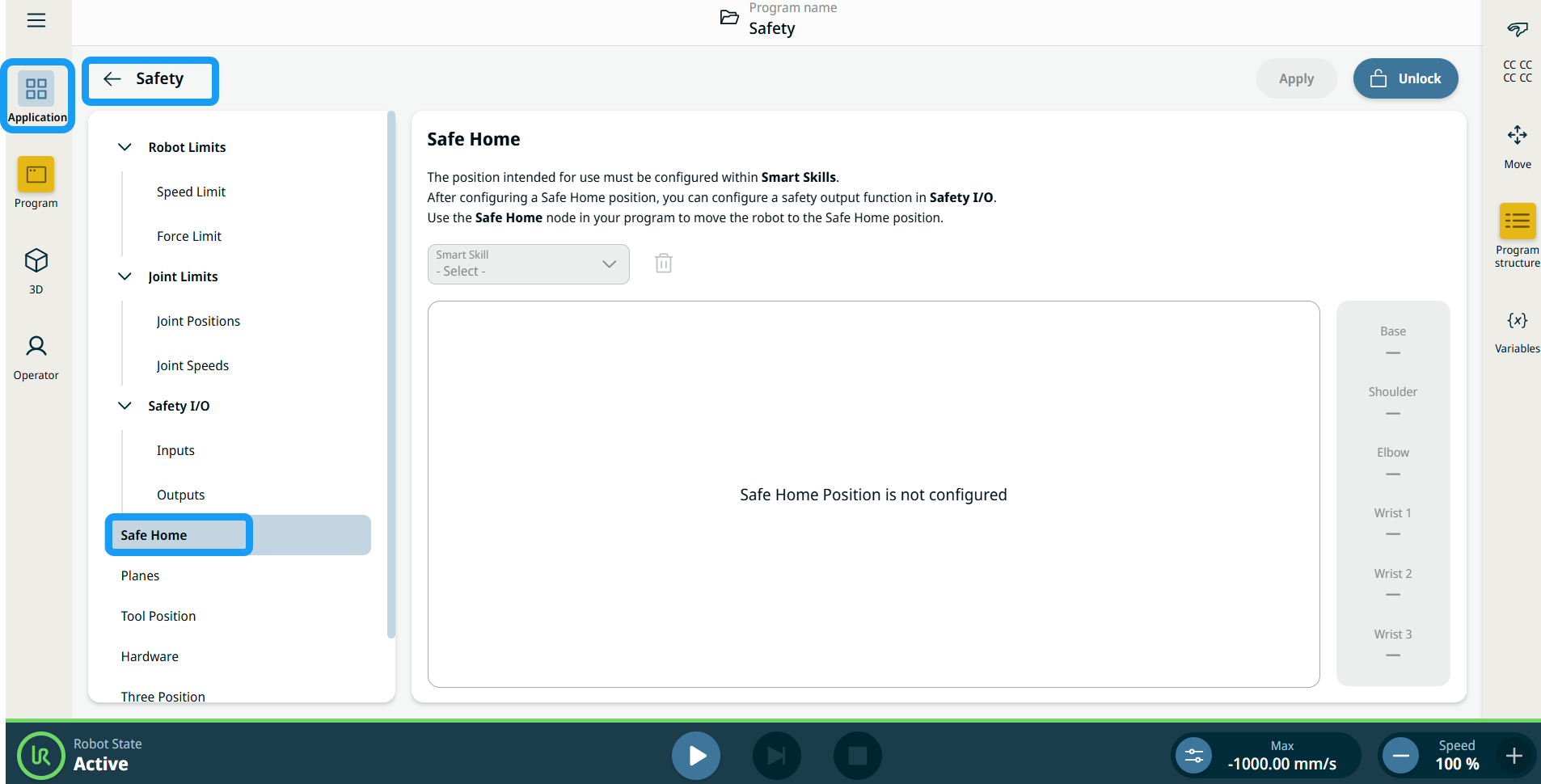
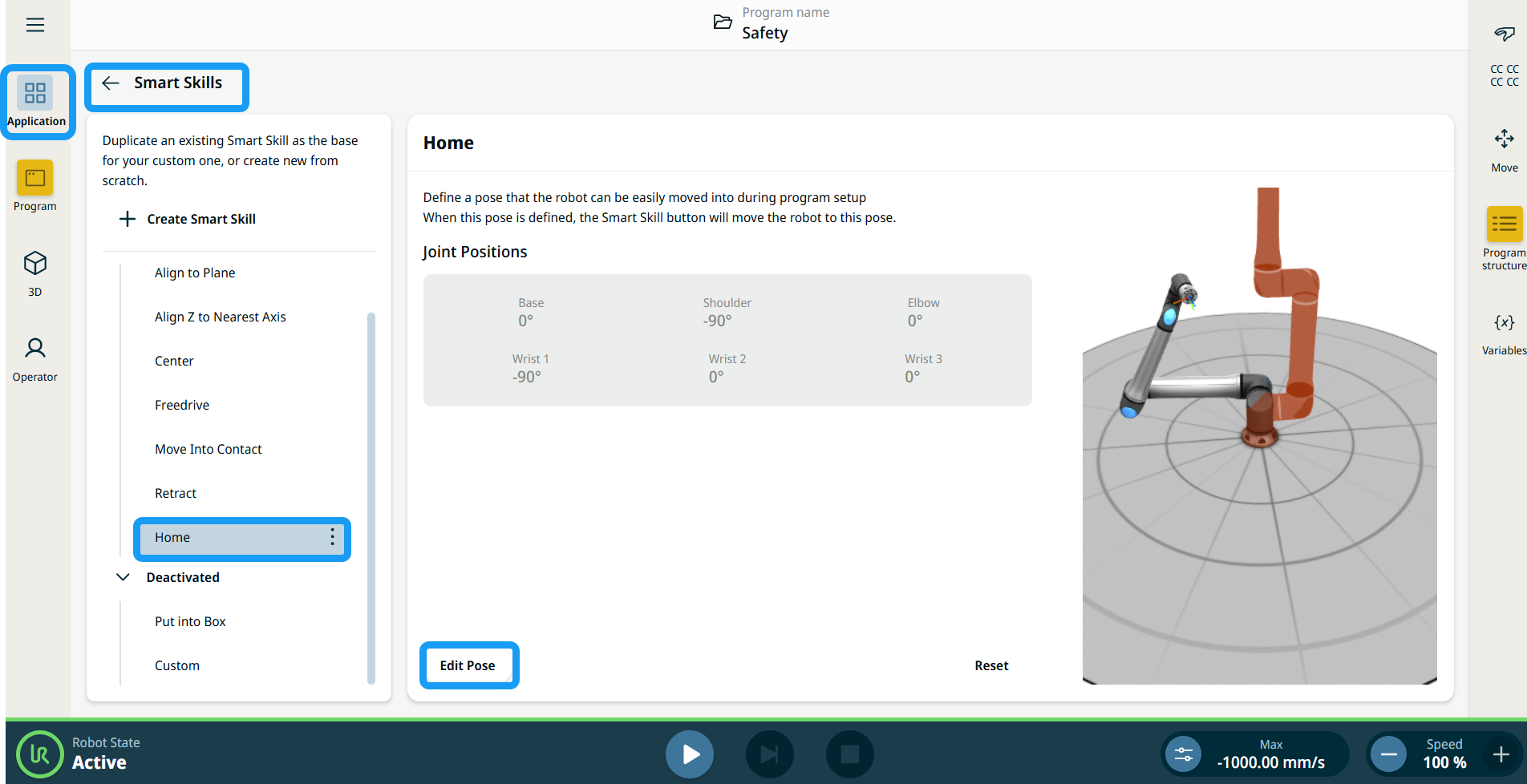
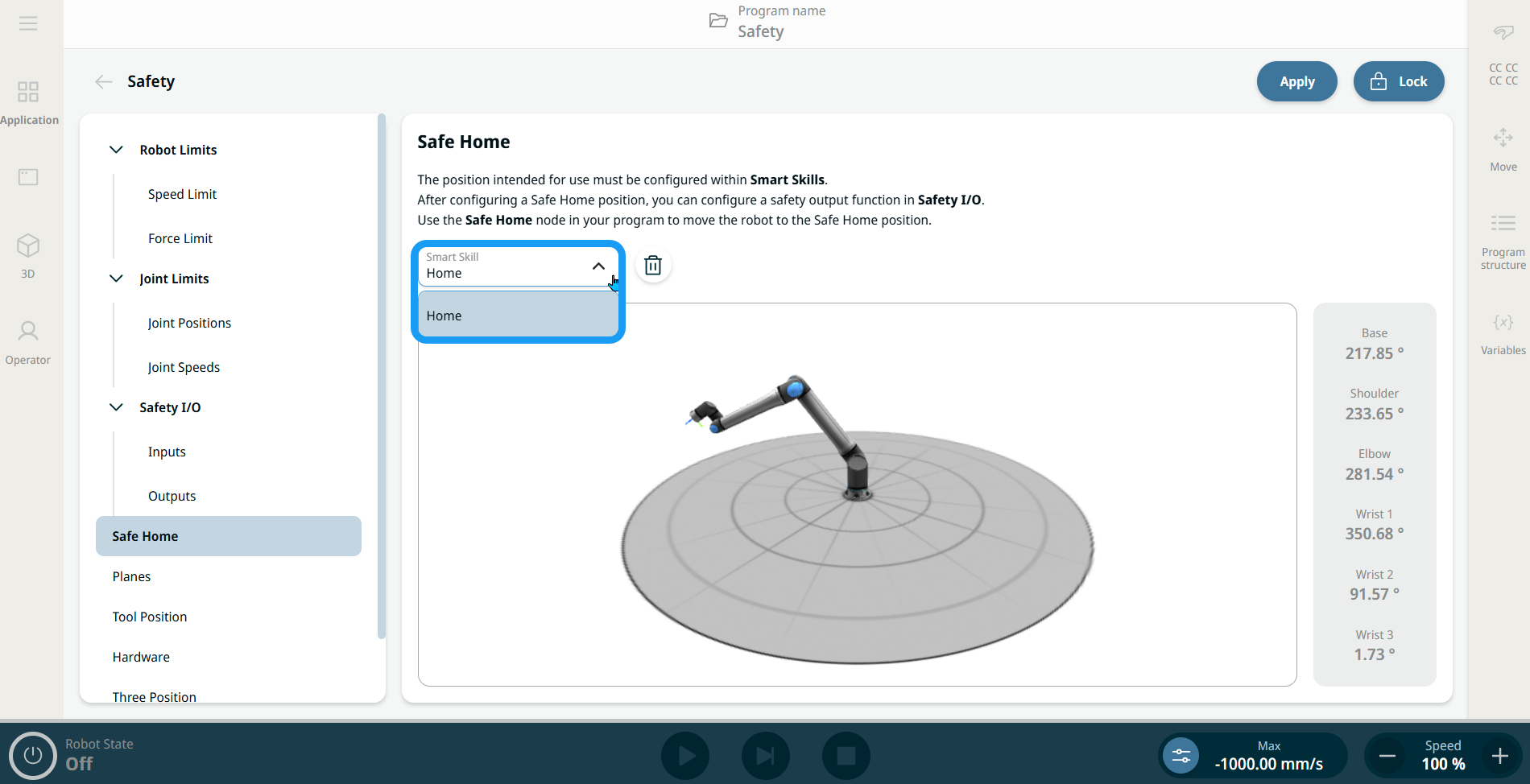
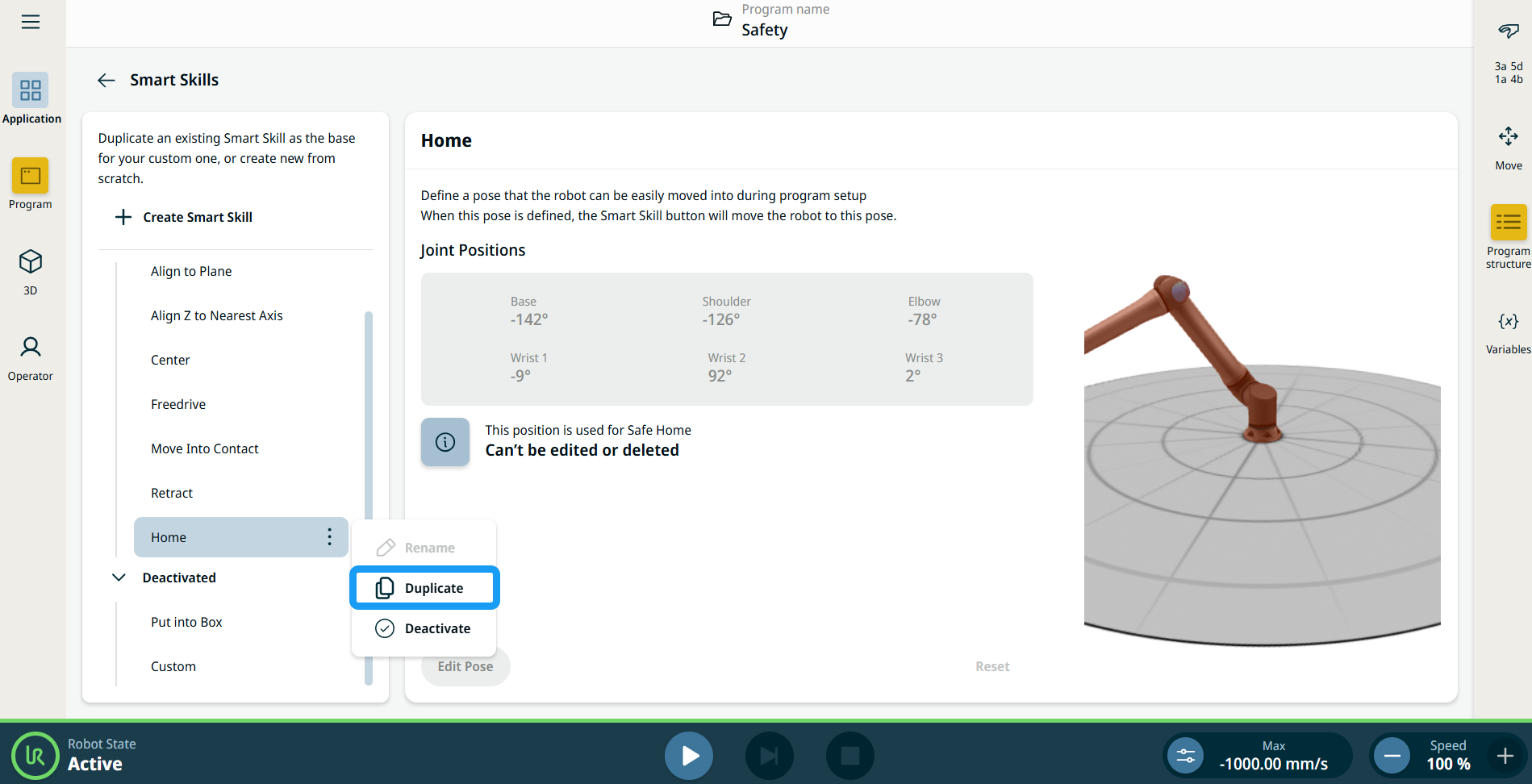
Bezpieczna pozycja początkowa to funkcja interfejsu PolyScope X, która umożliwia użytkownikom zdefiniowanie wyjścia związanego z bezpieczeństwem, które jest aktywowane, gdy robot osiągnie skonfigurowaną bezpieczną pozycję wyjściową. Użytkownik wybiera opcję Pozycja początkowa z listy rozwijanej dostępnych pozycji inteligentnych umiejętności, które można przypisać jako odniesienie dla bezpiecznej pozycji początkowej.
|
|
Przejdź do obszaru Bezpieczna pozycja początkowa |
|
|
|
|
|
|
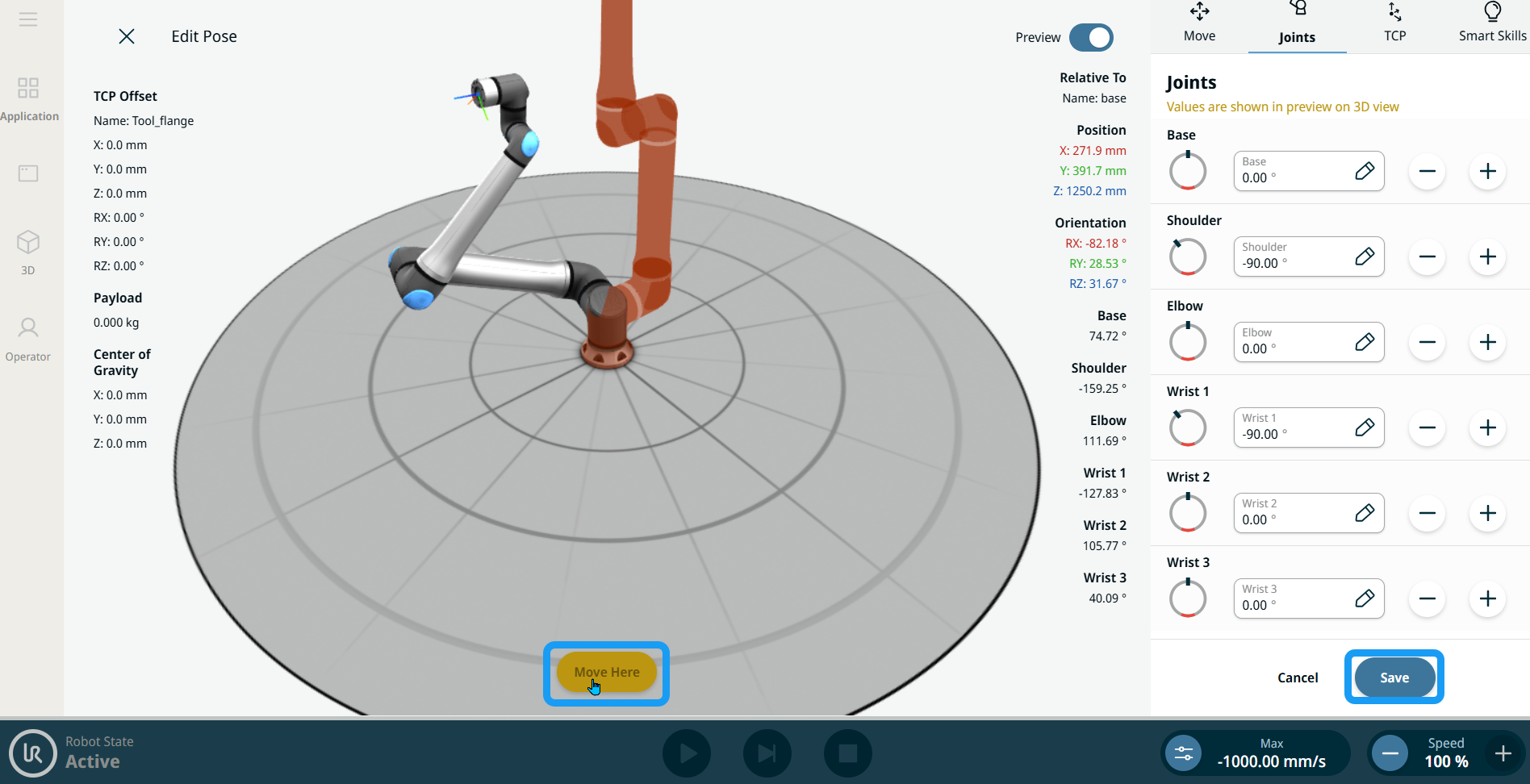
Jeśli jako punkt odniesienia dla pozycji Safe Home wybrano funkcję Position Smart Skill:
|
|
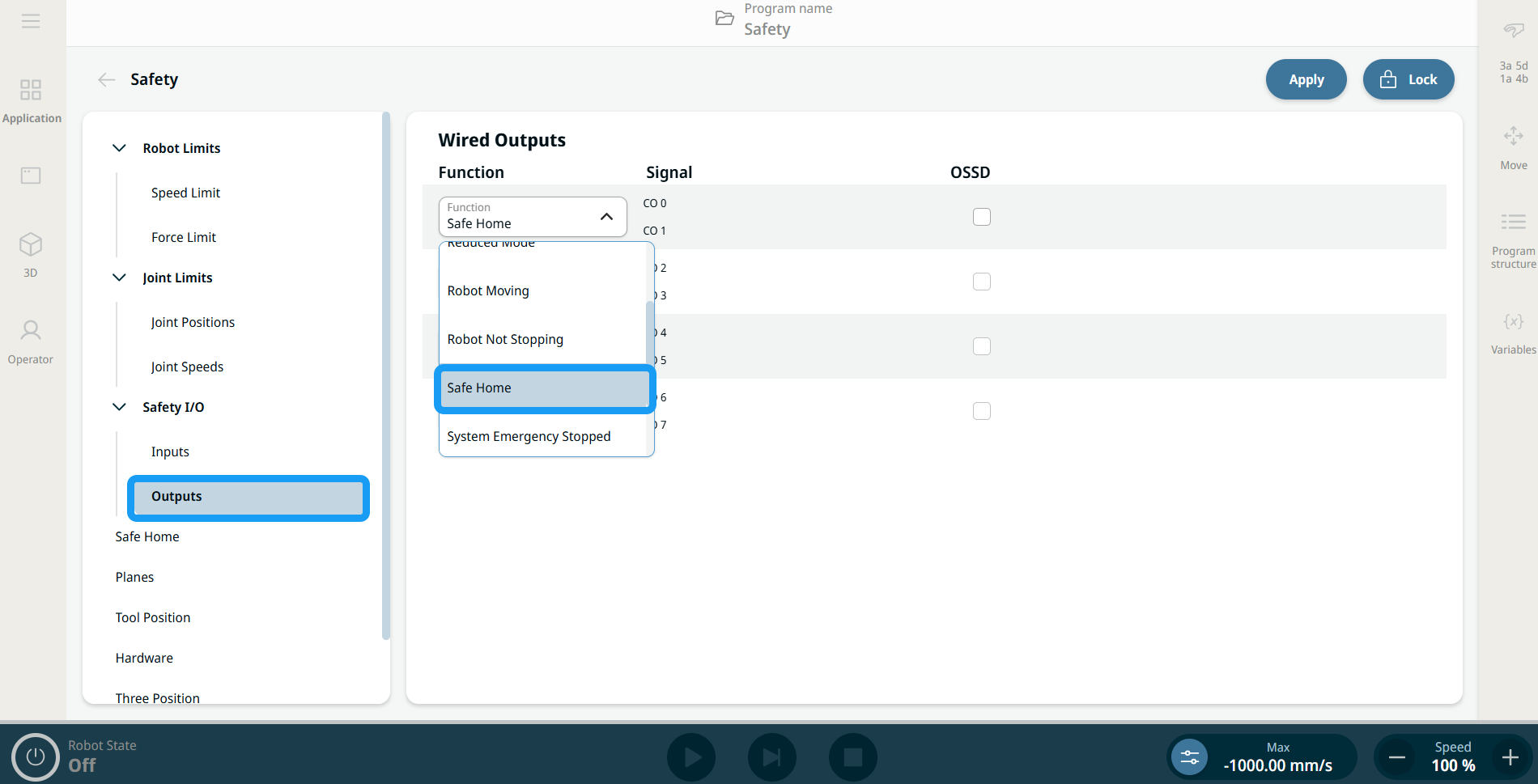
Funkcja Bezpieczna pozycja początkowa na wyjściach |
Jeśli pozycja początkowa jest przypisana do pozycji inteligentnej umiejętności w obszarze Bezpieczeństwo, lista rozwijana funkcji wyjścia bezpieczeństwa zawiera bezpieczną pozycję początkową jako nowe przypisanie funkcji. Wybierz opcję Bezpieczna pozycja początkowa w polach Funkcja w obszarze Wyjścia na karcie We/Wy bezpieczeństwa.
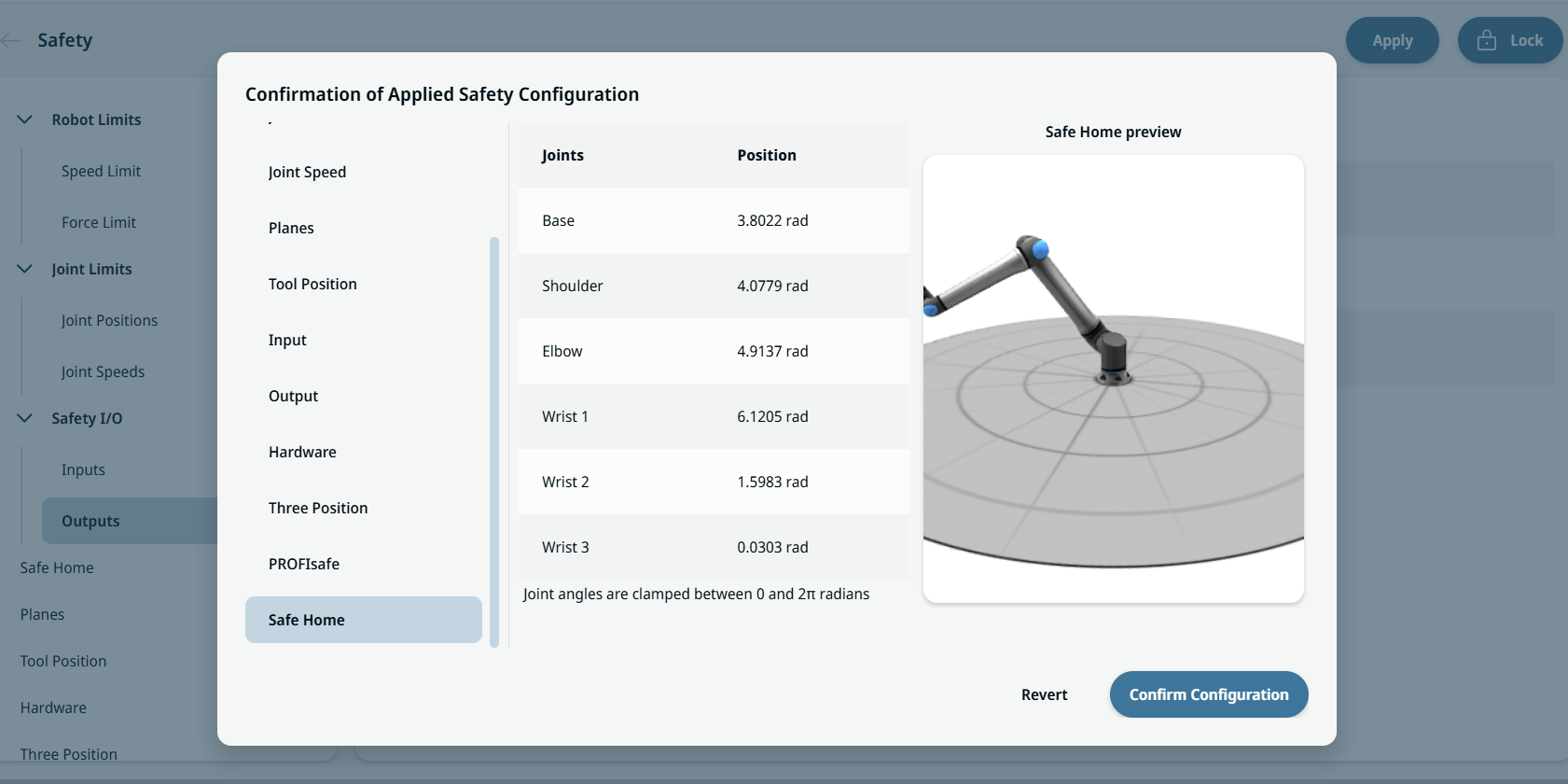
Bezpieczną pozycję początkową można zobaczyć w tabeli przypisania funkcji w oknie dialogowym przeglądu Potwierdzenie zastosowanej konfiguracji bezpieczeństwa.
|
|
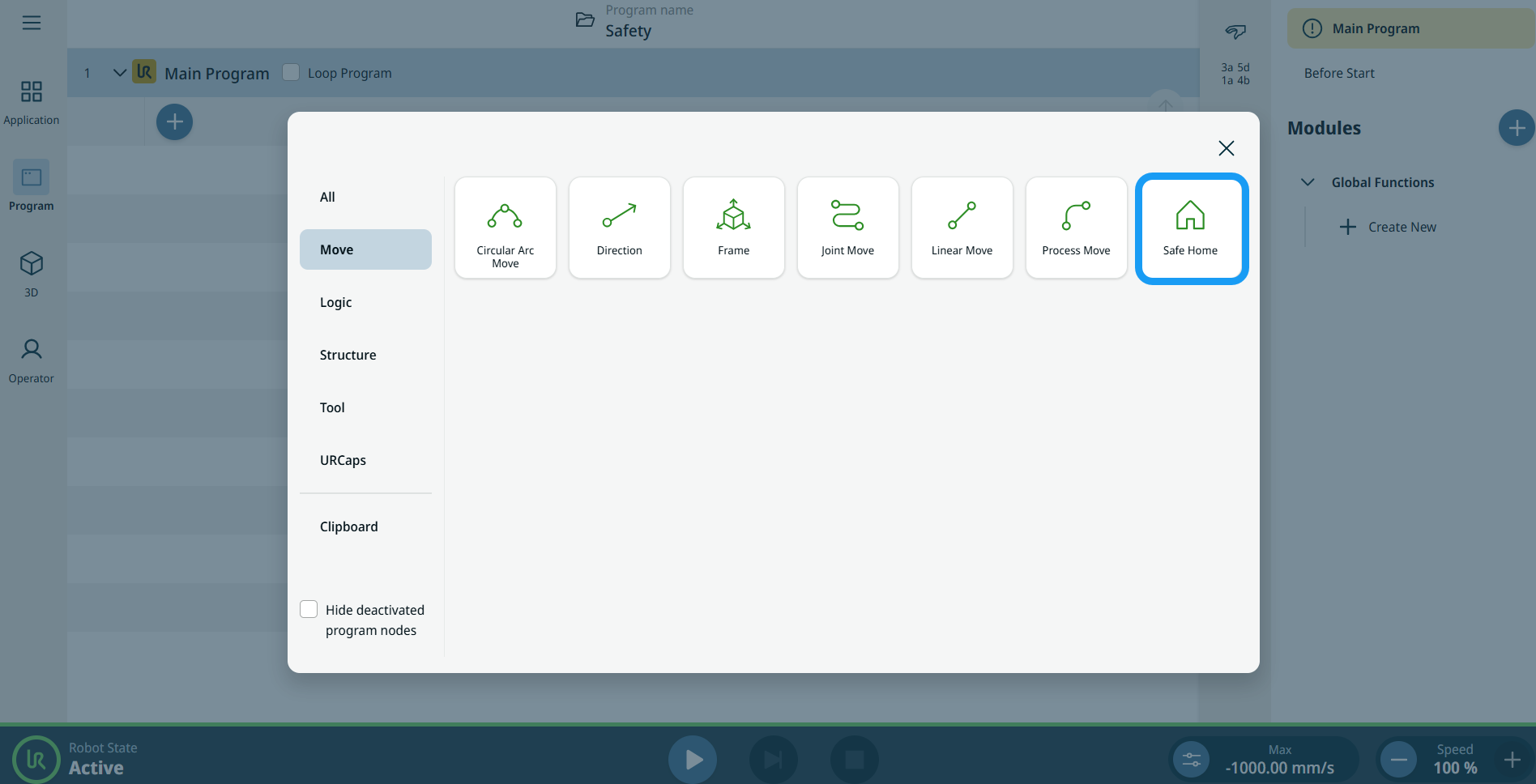
Bezpieczna pozycja początkowa jako węzeł programu |
Węzeł programu Bezpieczna pozycja początkowa znajduje się w kategorii Węzły ruchu w obszarze Węzły poleceń. Ten węzeł służy do wydawania robotowi poleceń przejścia do wstępnie zdefiniowanej bezpiecznej pozycji początkowej, skonfigurowanej w ustawieniach aplikacji bezpieczeństwa dla bezpiecznej pozycji początkowej.
Dodanie węzła bez skonfigurowanej bezpiecznej pozycji początkowej spowoduje oznaczenie węzła kolorem żółtym.

Po dotknięciu ikony wielokropka
|
 węzeł poleceń Bezpieczna pozycja początkowa wyświetla opcje profili ruchu i inne ustawienia zaawansowane.
węzeł poleceń Bezpieczna pozycja początkowa wyświetla opcje profili ruchu i inne ustawienia zaawansowane.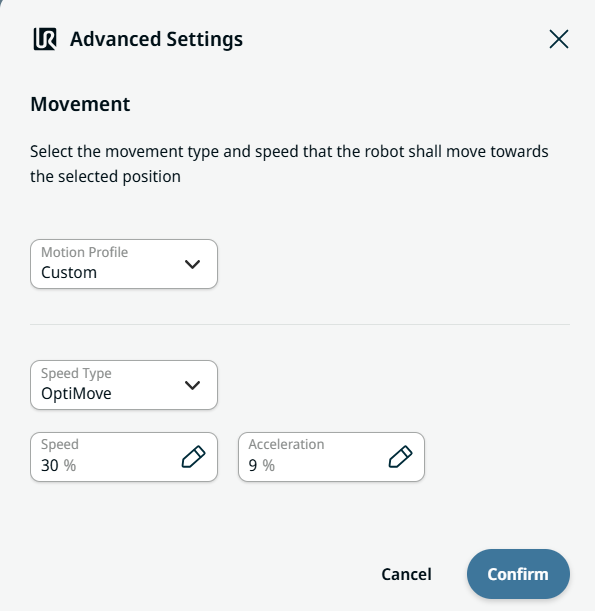
| Ustawienia zaawansowane |
Użytkownicy mogą tworzyć profile ruchu w obszarze Ustawienia zaawansowane, korzystając z dwóch kart i dwóch pól:
Profil ruchu jest funkcją umożliwiającą użytkownikom ustawianie predefiniowanych profili ruchu w węzłach ruchu: Ruch przegubu, Ruch liniowy, Ruch obrotowy łuku po okręgu, Ruch procesowy i Kierunek. Niestandardowy profil ruchu umożliwia użytkownikom zdefiniowanie danych ruchu w węźle ruchu. Opcją domyślną w polu Typ prędkości jest OptiMove. Wybierz ruch typu „ ” lub „ ”, jeśli chcesz wprowadzać prędkość i przyspieszenie w stopniach na sekundę lub milimetrach na sekundę. Ustawienia OptiMove są podawane w procentach, aby uprościć użytkowanie i konfigurację. Użytkownicy mogą skonfigurować procent preferowanej prędkości na karcie Prędkość, co ustawia docelową prędkość jazdy jako procent maksymalnej prędkości robota. Użytkownicy mogą skonfigurować procent preferowanego przyspieszenia na karcie Przyspieszenie, co ustawia docelowe limity momentu obrotowego podczas przyspieszania i zwalniania jako procent maksymalnej mocy robota.
|