Sygnały we/wy bezpieczeństwa
| Opis |
We/wy są podzielone między wejścia oraz wyjścia i dobrane w pary tak, że każda funkcja zapewnia poziom działania kategorii 3 PLd.
|
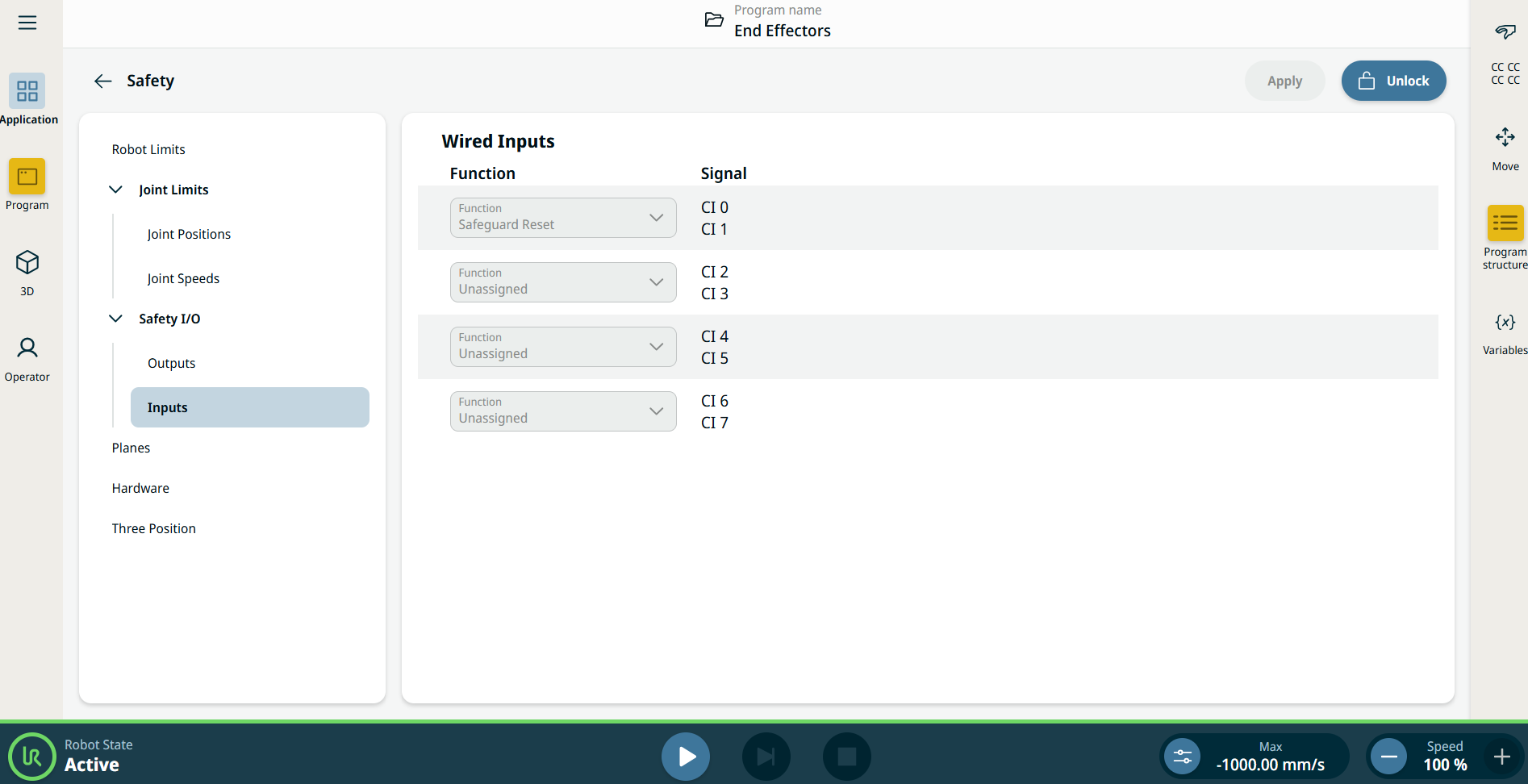
| Sygnały wejściowe |
Wejścia opisano w poniższej tabeli:
Kiedy wyłączone jest domyślne resetowanie zabezpieczeń, automatyczne resetowanie ma miejsce, gdy zabezpieczenie nie wyzwala już zatrzymania. Może się tak wydarzyć, jeśli jakaś osoba przejdzie przez pole zabezpieczenia. Jeśli osoba nie zostanie wykryta przez zabezpieczenia i zostanie narażona na ryzyko, zgodnie z normą automatyczne resetowanie nie jest możliwe.
Kiedy zatrzymanie przez zabezpieczenie w trybie automatycznym jest włączone, zatrzymanie przez zabezpieczenie nie jest wyzwalane w trybie ręcznym.
|
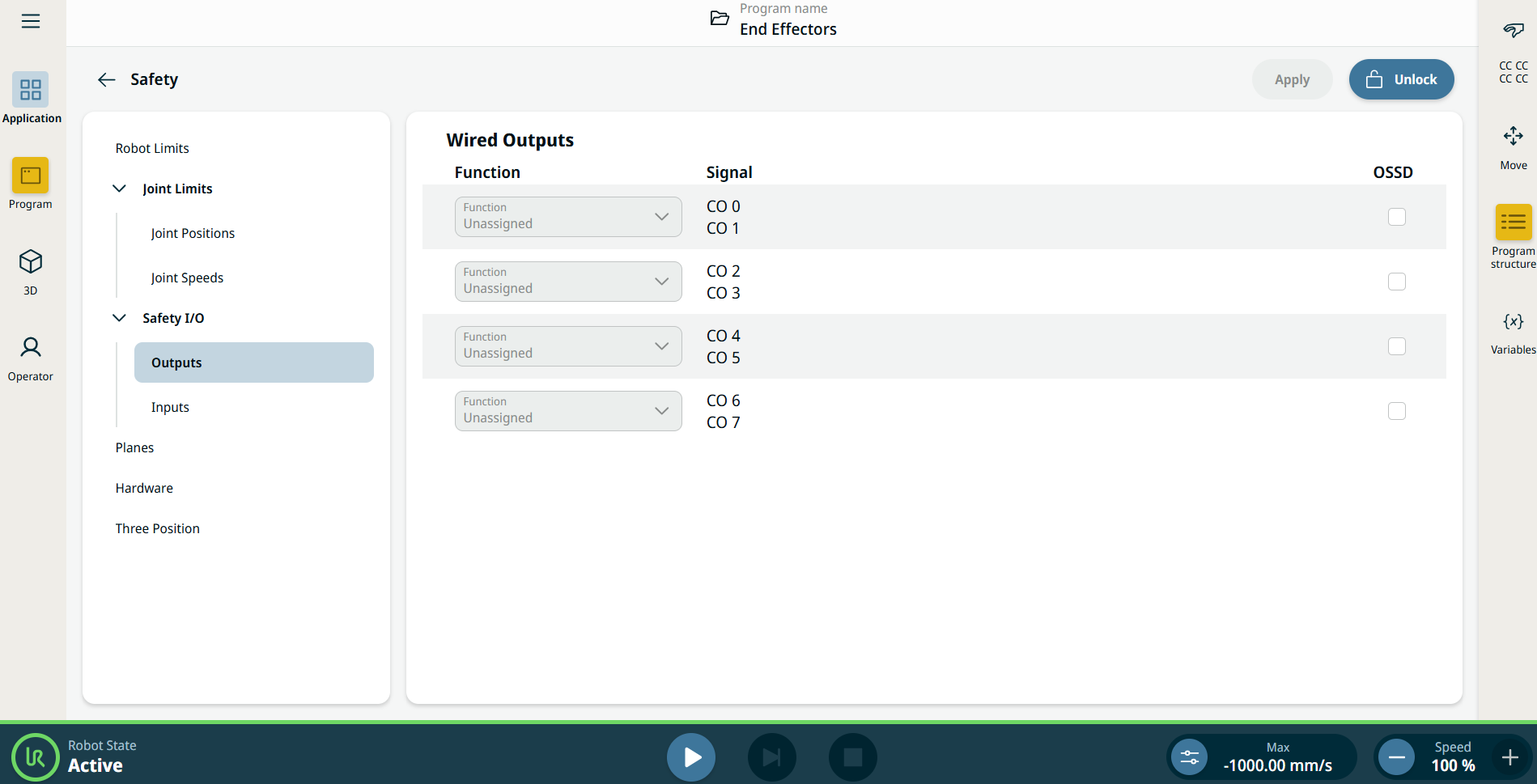
| Sygnały wyjściowe |
Wszystkie wyjścia bezpieczeństwa zmienią stan na niski w przypadku usterki lub naruszenia systemu bezpieczeństwa. Oznacza to, że wyjście zatrzymania systemu inicjuje zatrzymanie, nawet gdy nie naciśnięto przycisku zatrzymania awaryjnego. Można skorzystać z następujących sygnałów wyjściowych funkcji bezpieczeństwa. Wszystkie sygnały powracają do stanu niskiego, kiedy zaniknie warunek wyzwalający stan wysoki:
Wszystkie maszyny zewnętrzne przechodzące w stan zatrzymania awaryjnego na podstawie sygnału z robota za pośrednictwem wyjścia zatrzymania systemu muszą być zgodne z normą ISO 13850. Jest to szczególnie konieczne w konfiguracjach, w których wejście Zatrzymania Awaryjnego Robota jest podłączone do zewnętrznego urządzenia Zatrzymania Awaryjnego. W takich przypadkach wyjście zatrzymania systemu ma stan wysoki po zadziałaniu zewnętrznego urządzenia zatrzymania awaryjnego. Oznacza to, że stan zatrzymania awaryjnego na maszynie zewnętrznej zostanie zresetowany bez konieczności ręcznego działania ze strony operatora robota. W związku z tym, aby zachować zgodność z normami bezpieczeństwa, maszyna zewnętrzna musi wymagać ręcznego działania w celu wznowienia.
|