Smart Skills Application
| Beskrivelse |
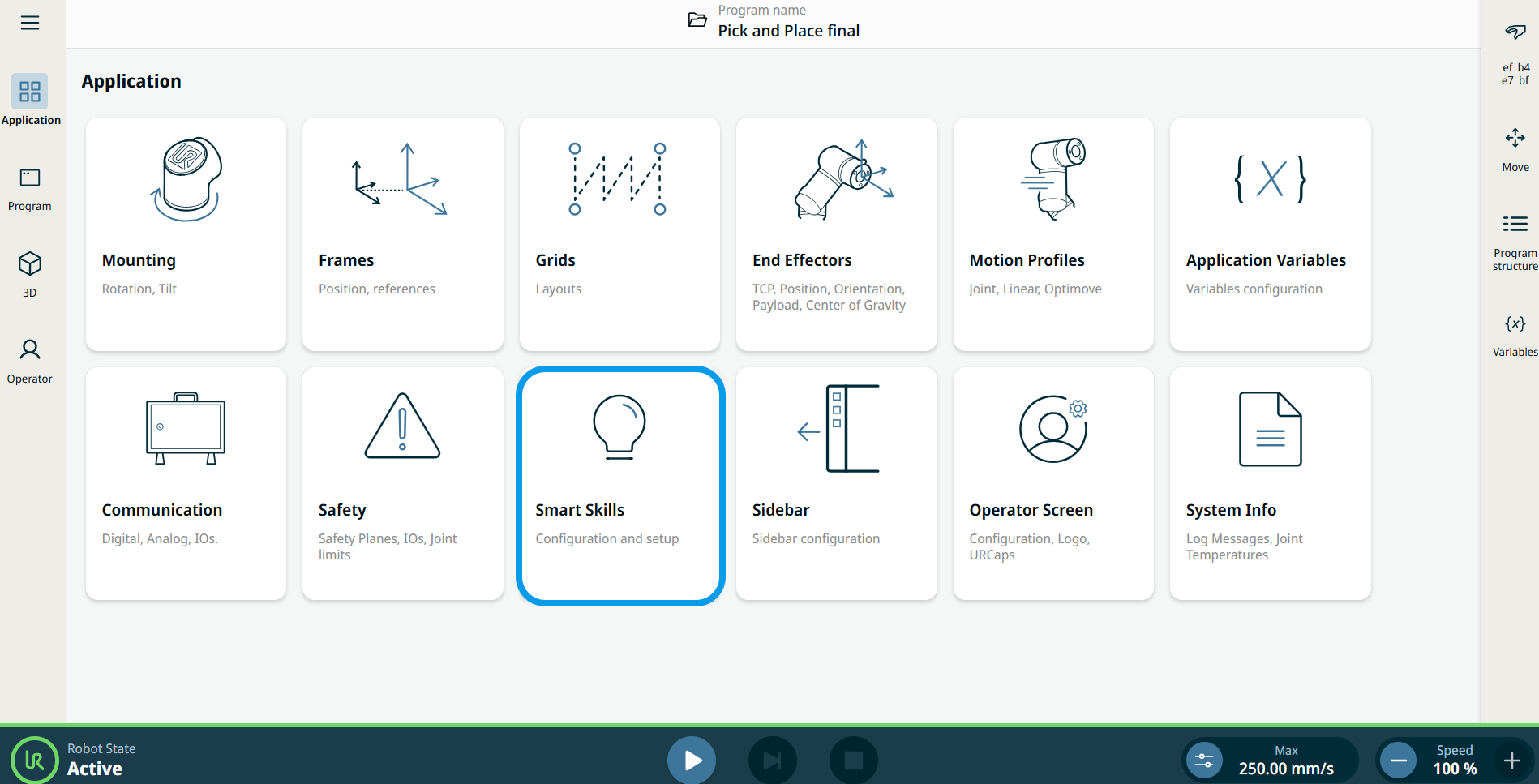
All Smart Skills are parametrized, which enables you to configure and set up the Smart Skills in the Application tab. The Smart Skills interface gives you the following benefits:
|
|
Using the Smart Skills application functionality |
|
|
|
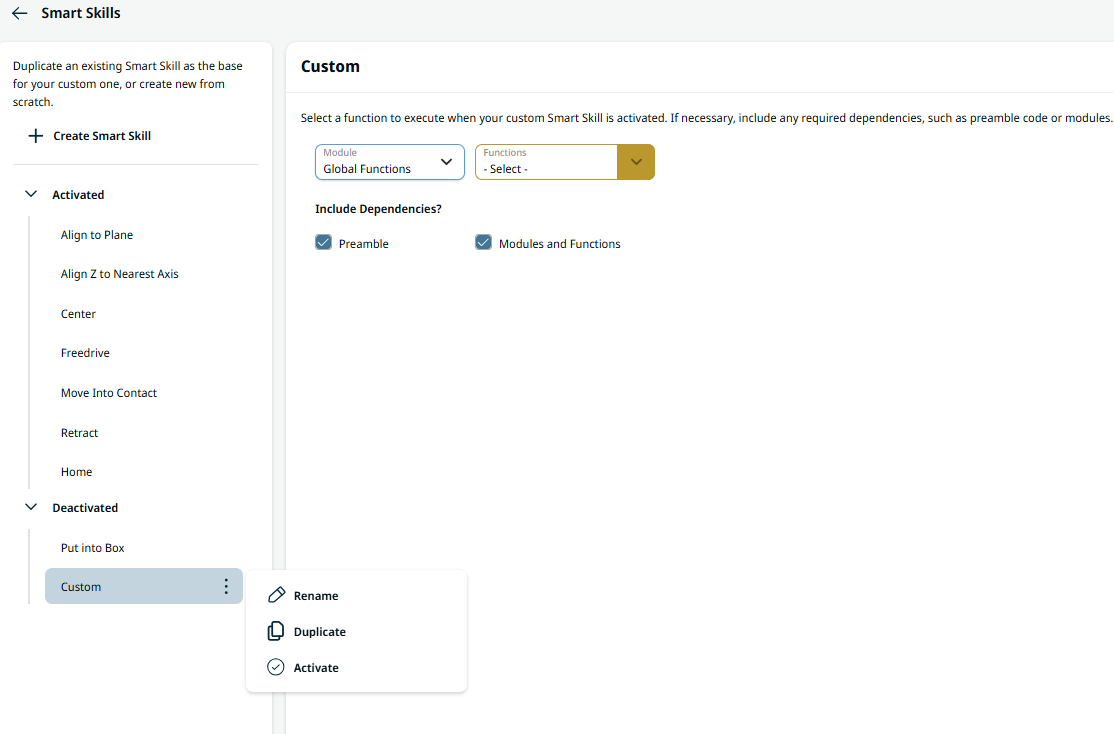
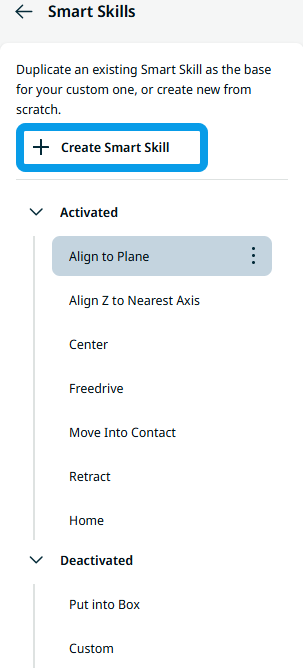
The process of creating custom Smart Skills is streamlined for ease of use. Instead of duplicating existing skills, tap + Create Smart Skill button to start from scratch, found at the left panel before the list of Smart Skills. This makes it easier and more intuitive for users to build tailored Smart Skills, enhancing productivity and reducing setup time.
|
|
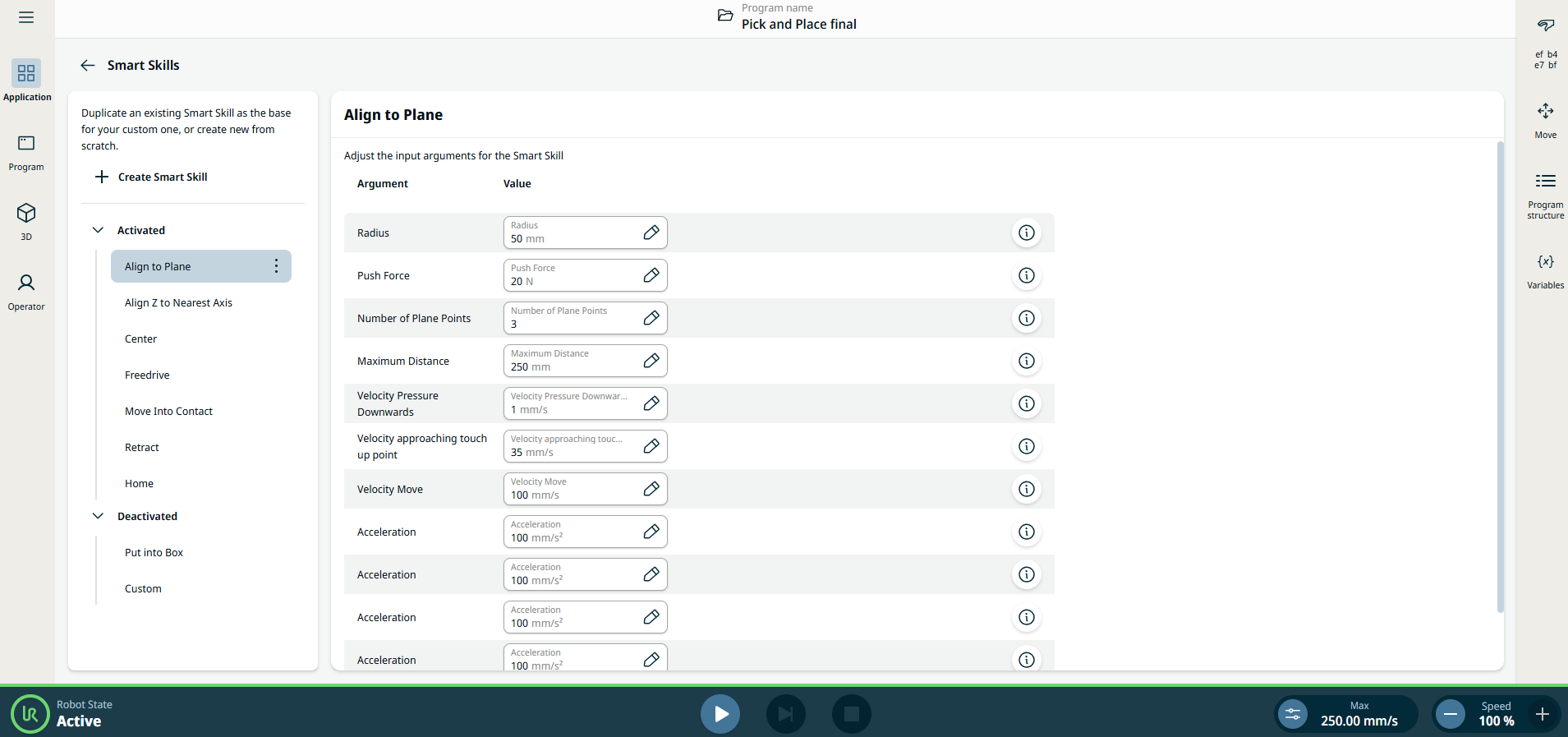
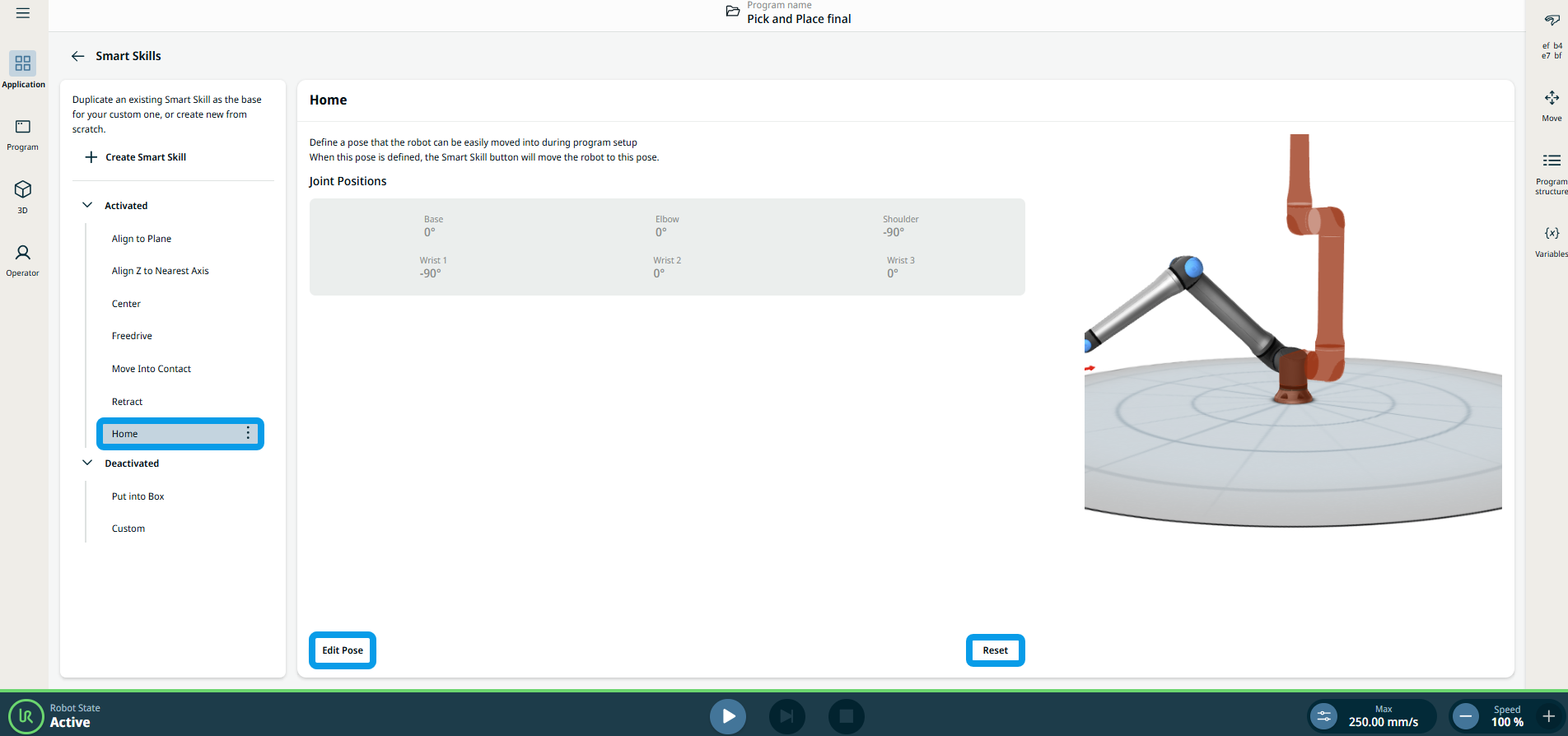
Smart Skill Input Argument |
Each Smart Skill has a couple of parameters it uses when it executes. These can be changed to fit the application that you are running, whether or not it fits the default values.
These are the input arguments of the smart skills where you can change the value:
|
|
|
|
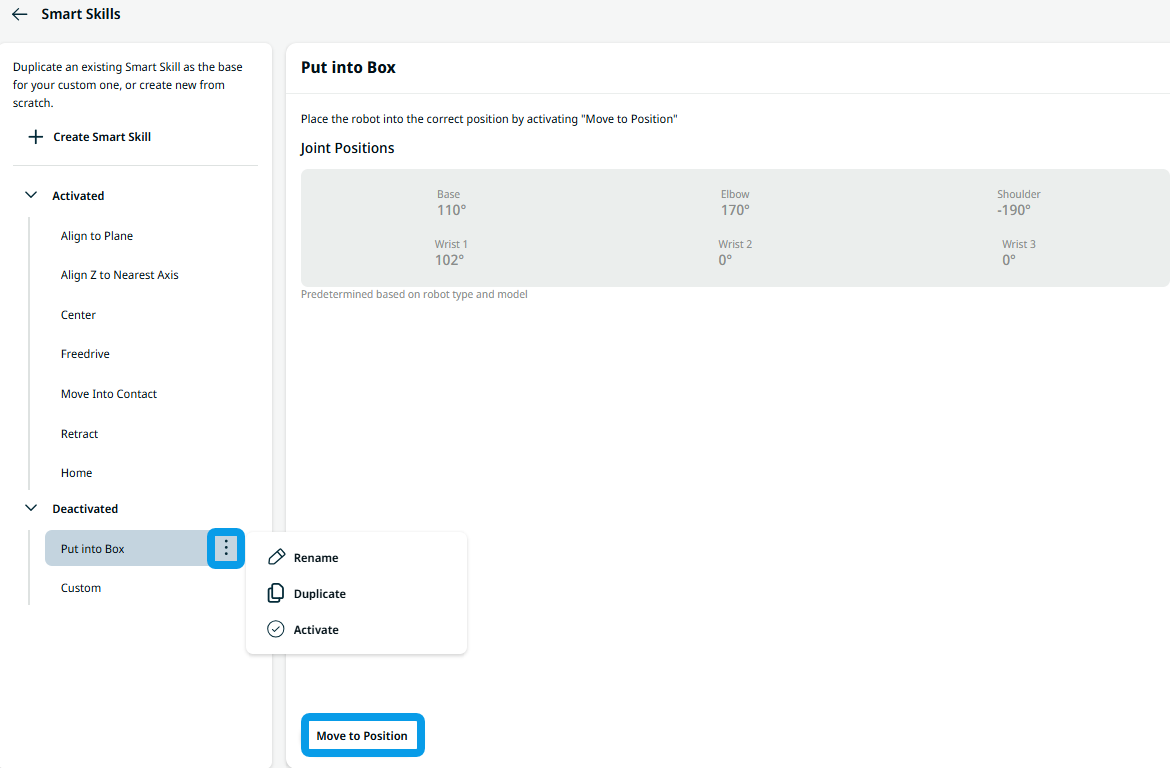
| Deactivated Smart Skills by default |
|
|
|
|