Sikkerhetsplan ved bruk av ramme
| Beskrivelse |
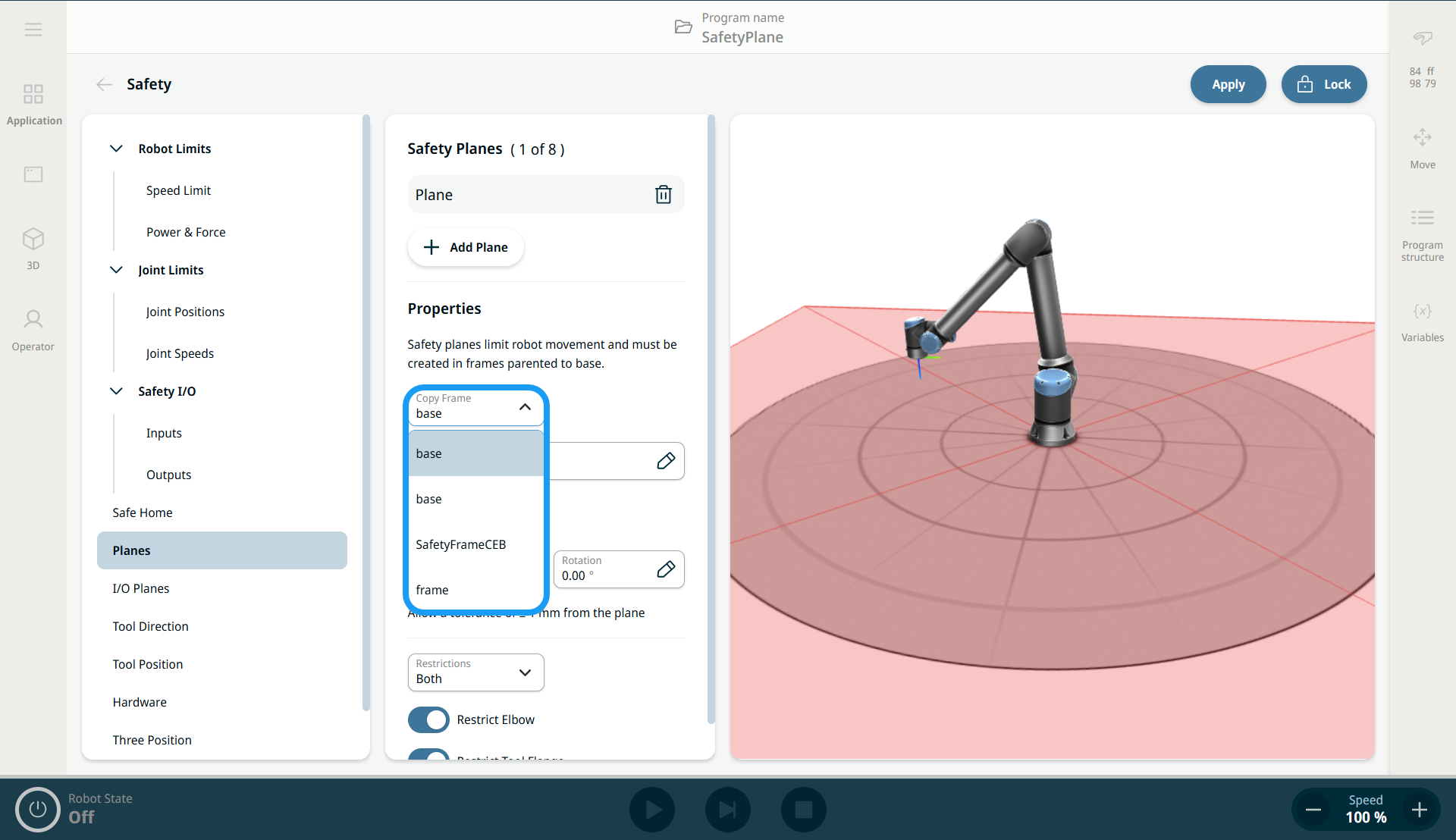
Du kan bruke en eksisterende ramme til å definere et sikkerhetsplan. Dette gir en mer intuitiv måte å spesifisere planparametere på fra en forhåndsdefinert posisjon og rotasjon (X, Y, Z, RX, RY, RZ). Velg rammen i Kopier ramme rullegardinmenyen.
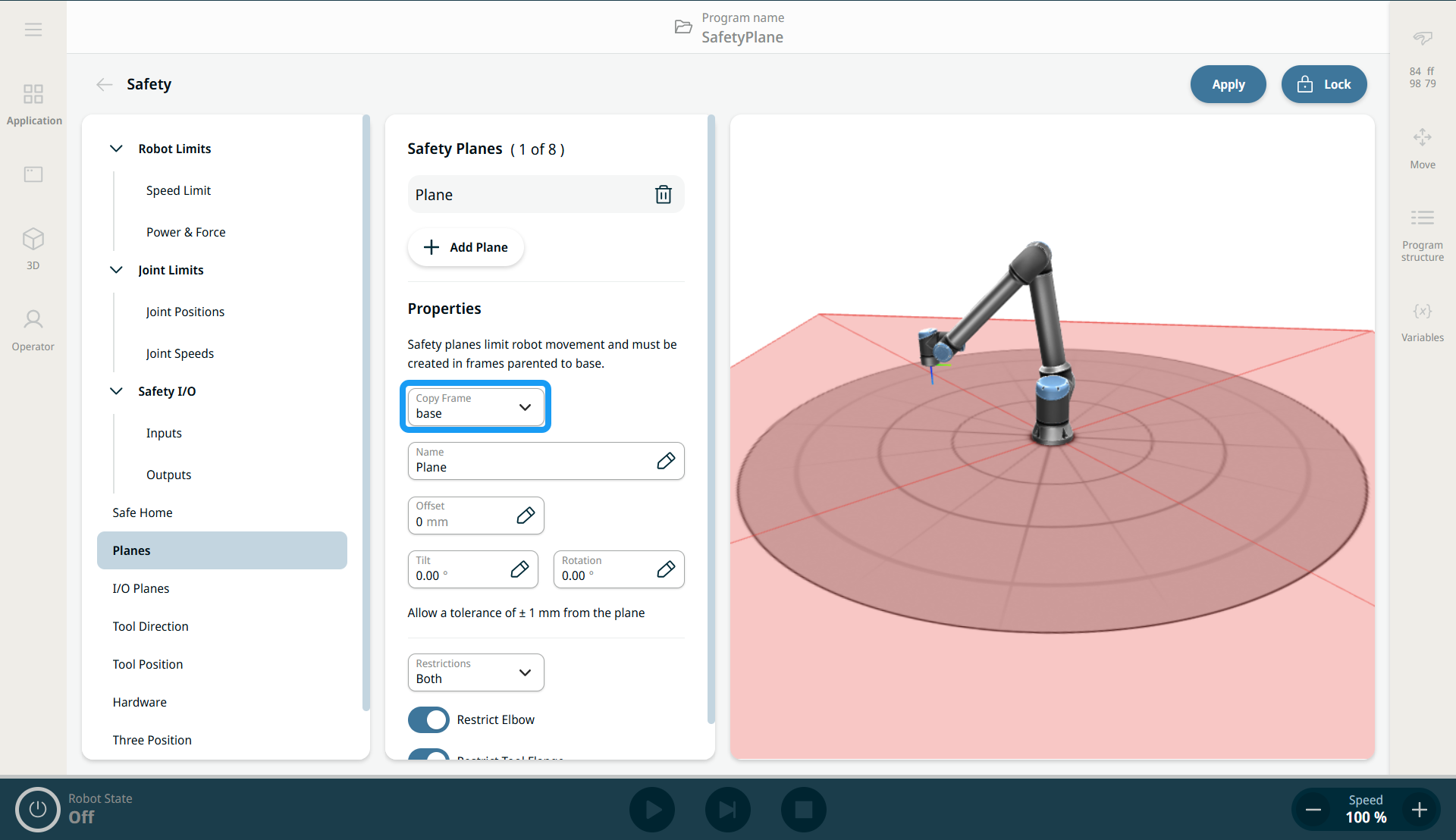
Kopier ramme -rullegardinmenyen finnes i parametrene for en sikkerhetsplan-definisjon på Planer -skjermen. Denne listen inneholder rammer som er definert på skjermbildet Rammer. Når du velger en ramme, brukes den som definisjon av sikkerhetsplanet. Hvis du angir parametere for forskyvning, vinkling og rotasjon, blir disse brukt på den valgte rammen (se «Konfigurere et sikkerhetsplan»). Det resulterende sikkerhetsplanet kombinerer alle parametrene.
|
|
|
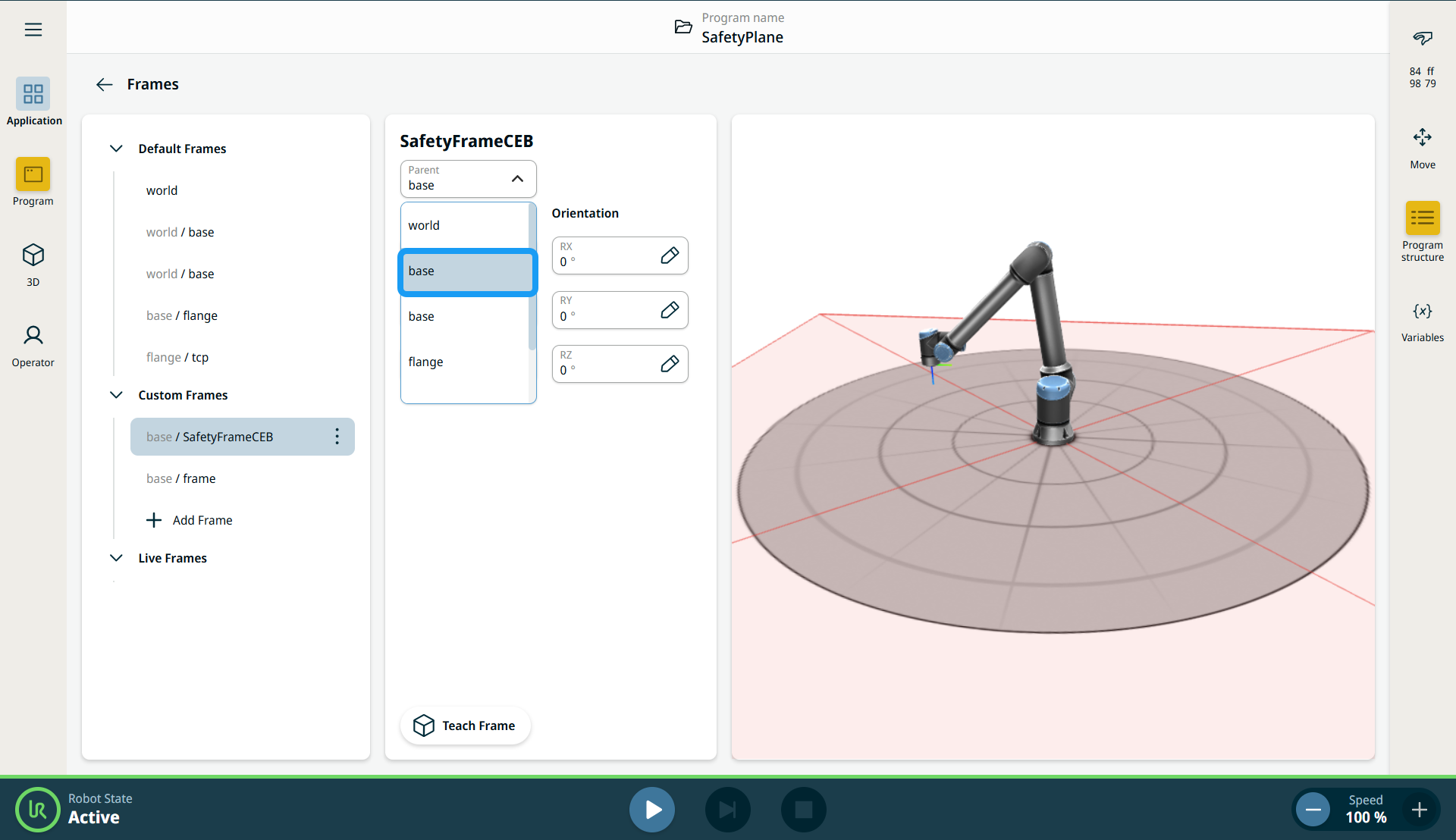
Se avsnittet «Rammer» i programvarehåndboken. |
|
Opprett en ramme |
|
|
|
Velg referanseramme i sikkerhetsplanet |
|
|
|
|
|
|
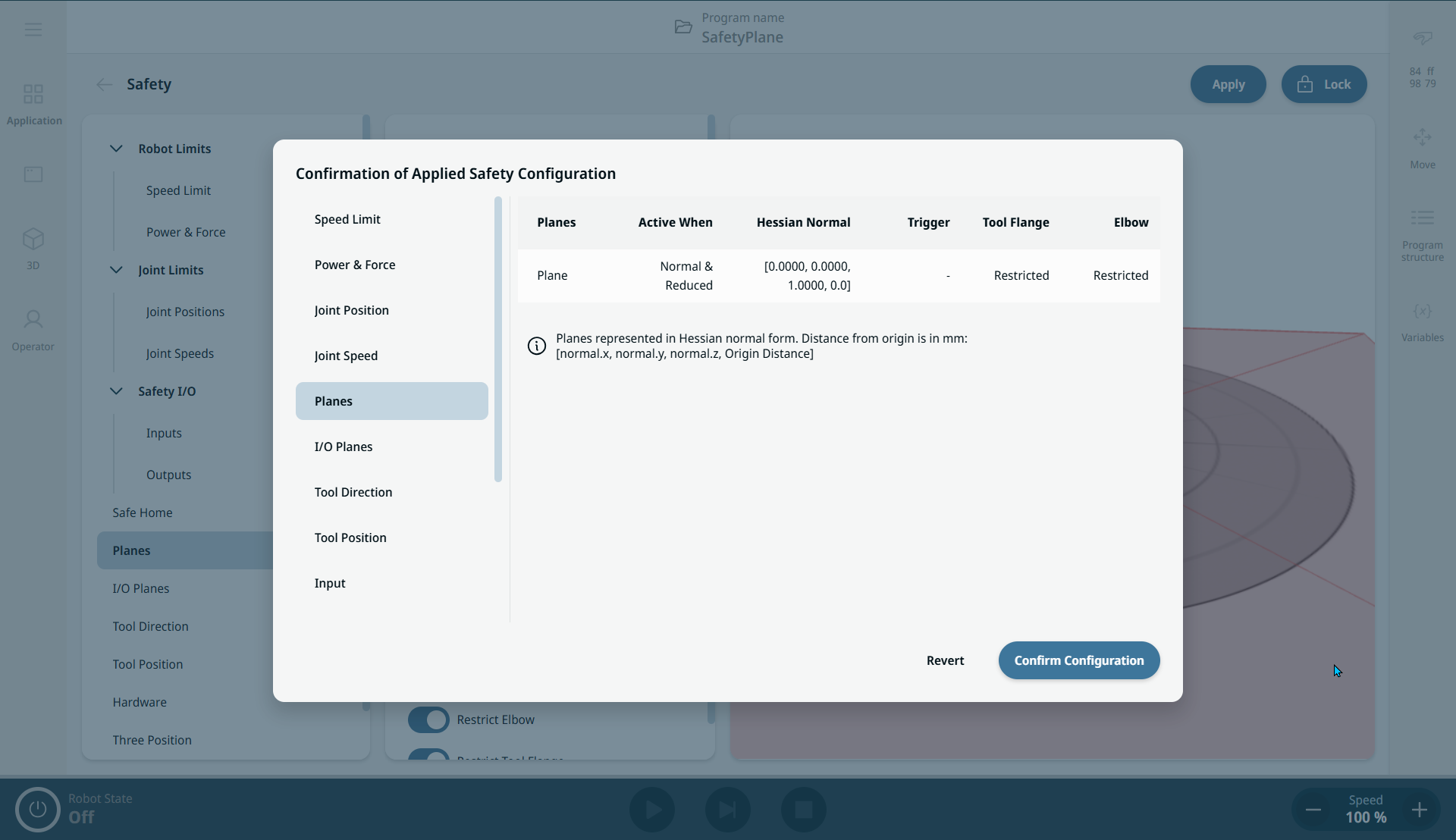
En ramme som brukes til et sikkerhetsplan kan være speilvendt i forhold til hva du forventer. Hvis roboten er plassert på den siden av planet som bryter reglene, må du legge til en vinkel på 180 grader. For begrensninger på plankonfigurasjoner, begrensninger for albueledd og begrensninger for verktøyflens, se «Sikkerhetsplaner».
|