Sikkert hjem
| Beskrivelse |
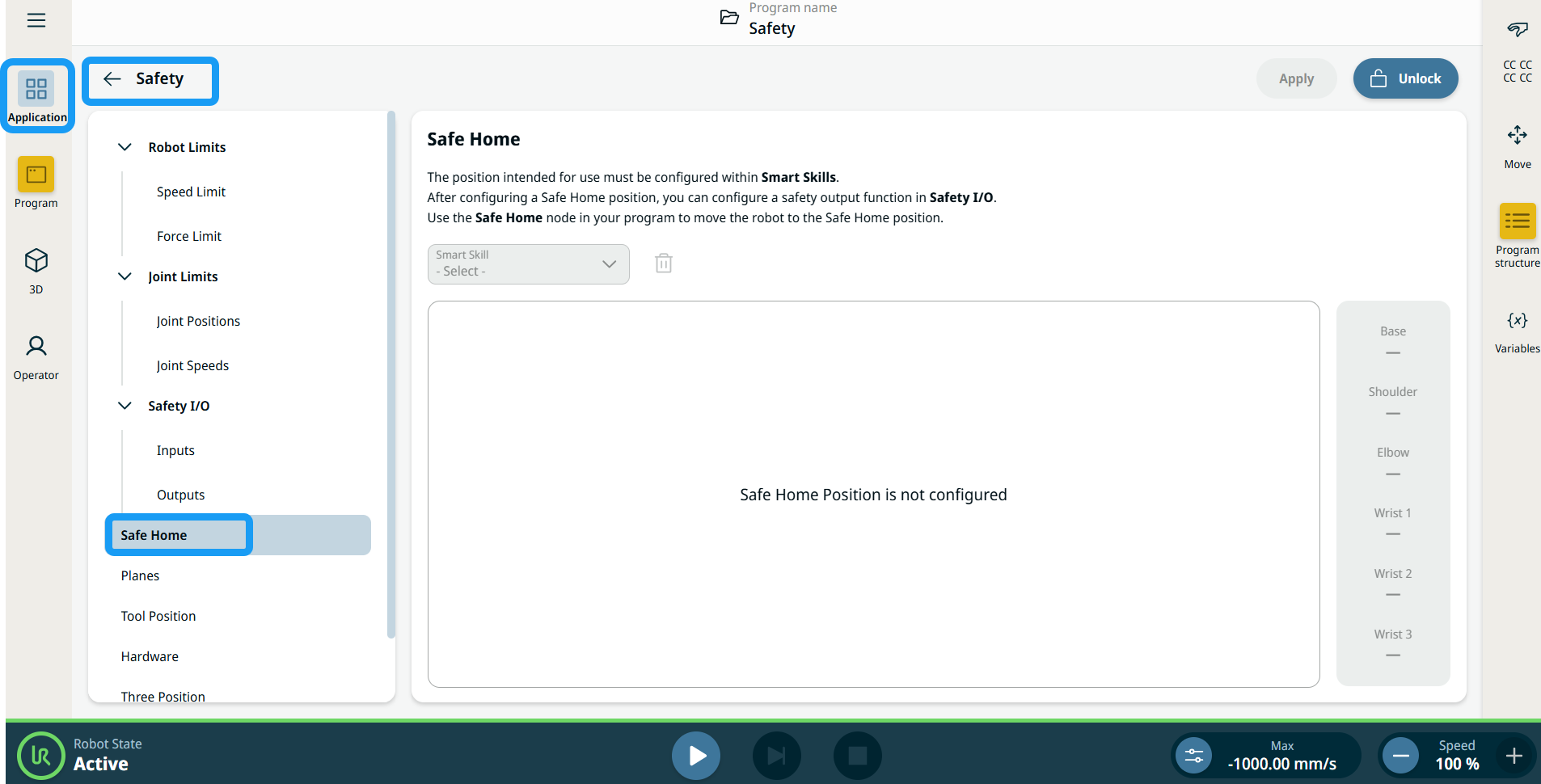
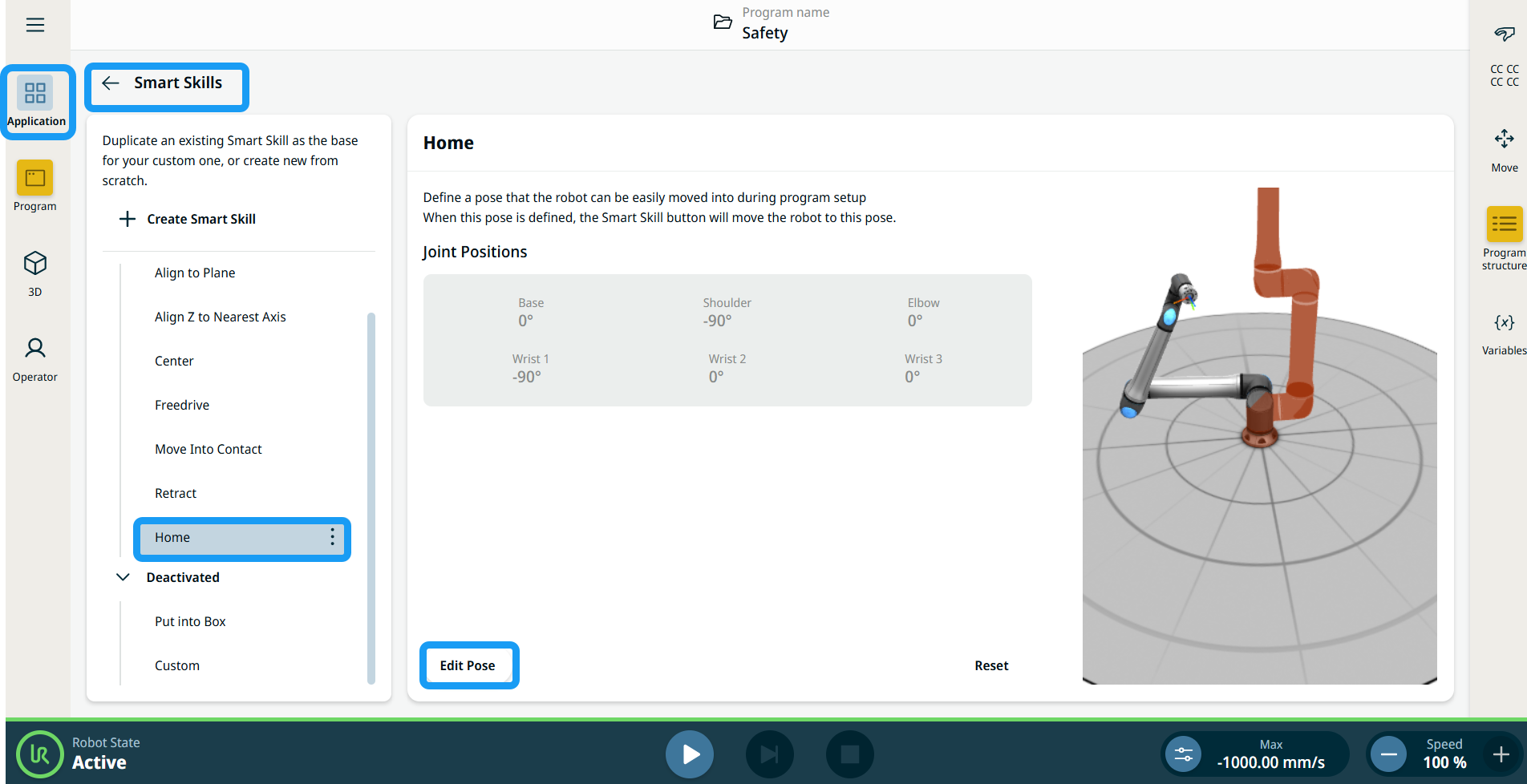
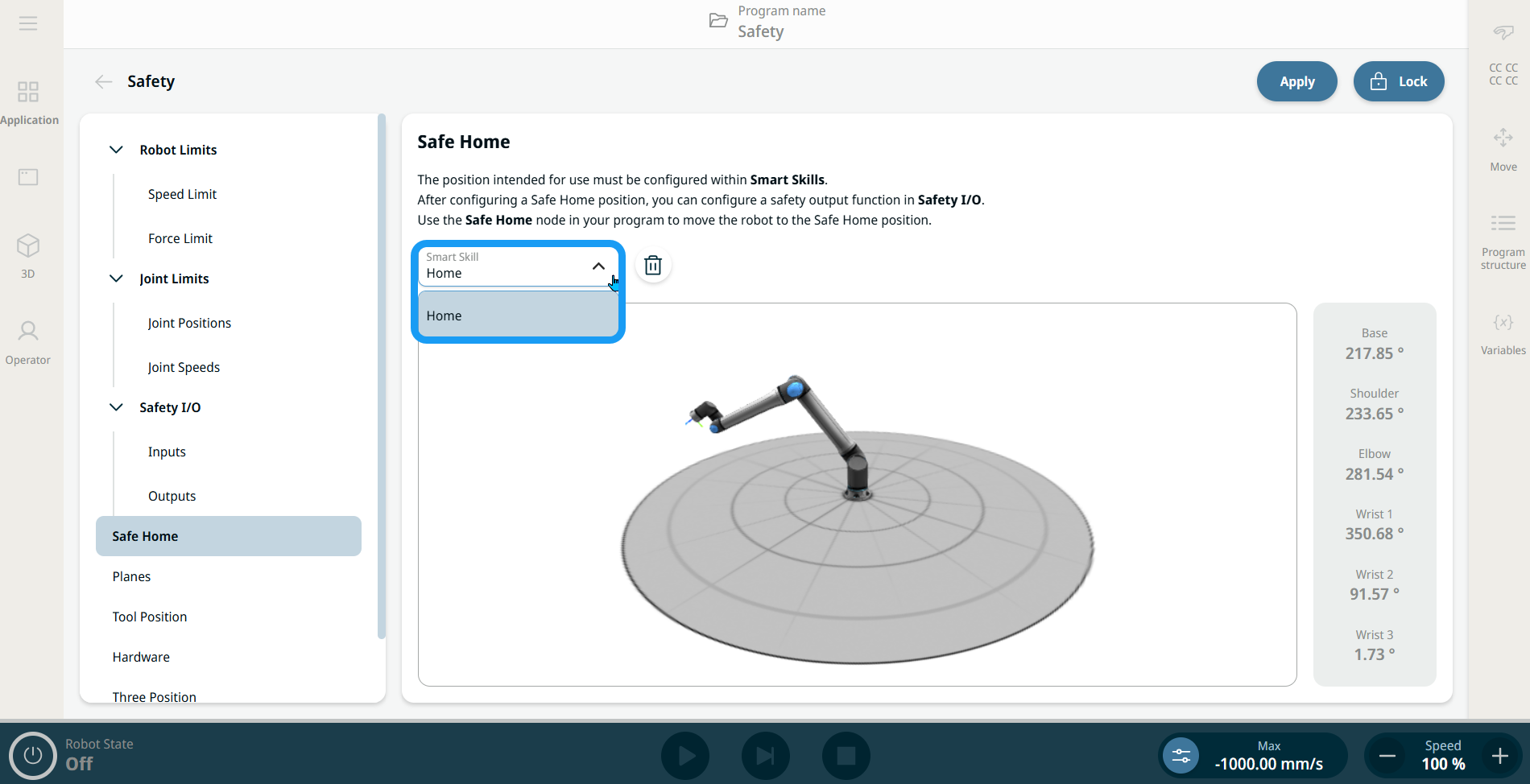
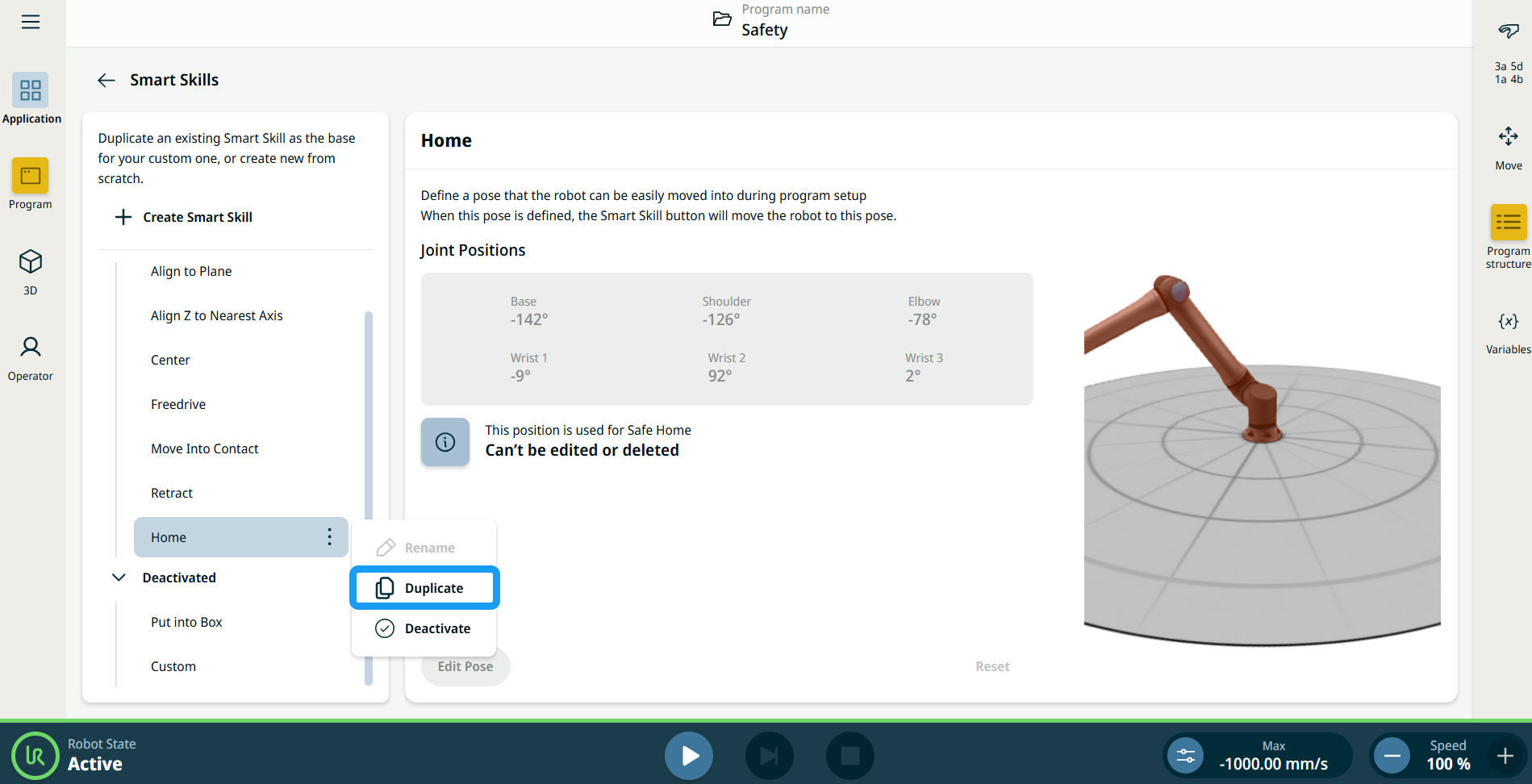
Safe Home er en PolyScope X-funksjon som gjør det mulig for brukere å definere en sikkerhetsrelatert utgang som aktiveres når roboten når den konfigurerte sikkert hjem-posisjonen. Brukeren velger Hjem i rullegardinmenyen over tilgjengelige smartferdighetsposisjoner, som kan tildeles som referanse for «Sikkert hjem»-posisjonen.
|
|
Åpne Sikkert hjem |
|
|
|
|
|
|
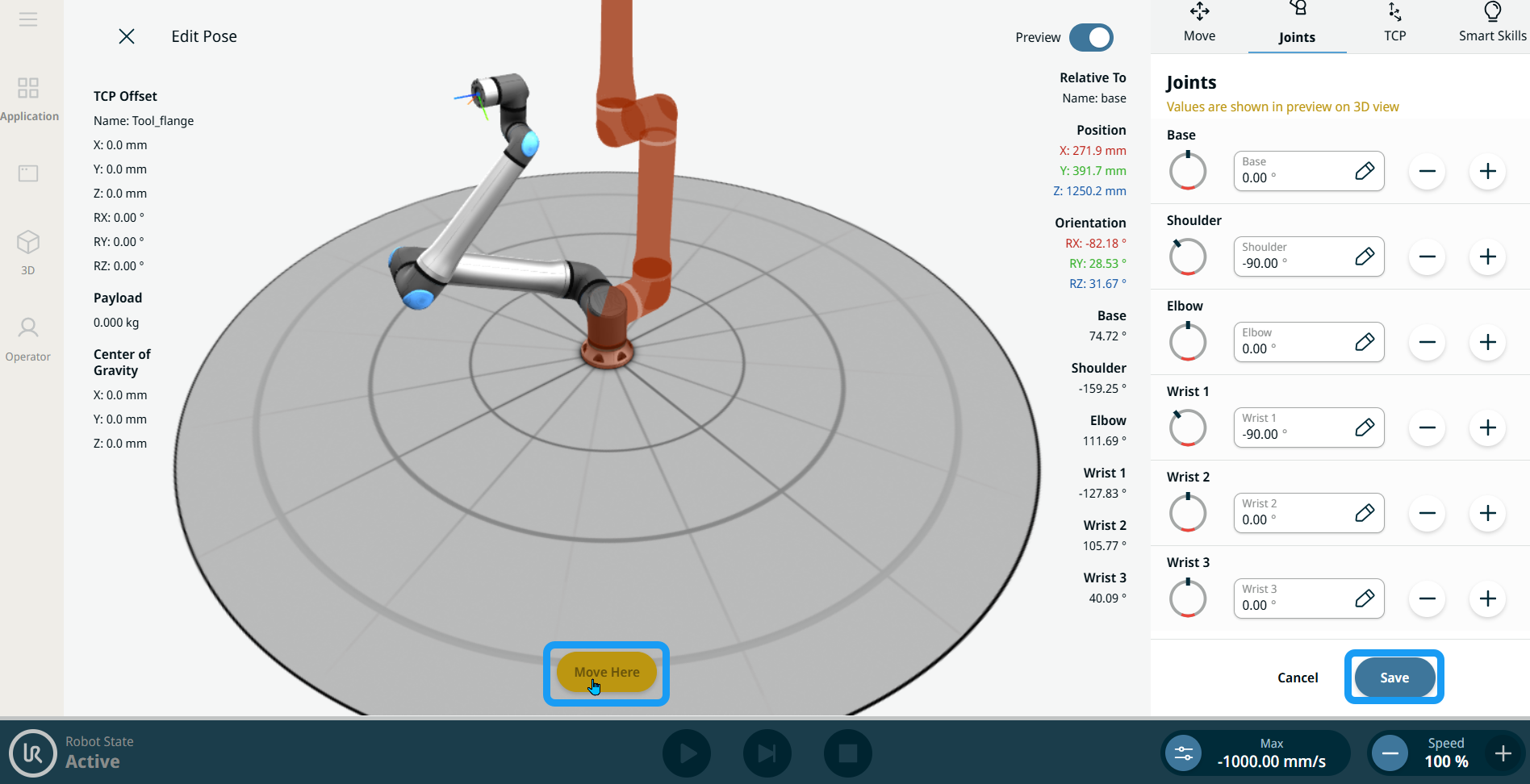
Hvis Position Smart Skill er valgt som posisjonsreferanse for Safe Home:
|
|
Sikkert hjem-funksjonen i utganger |
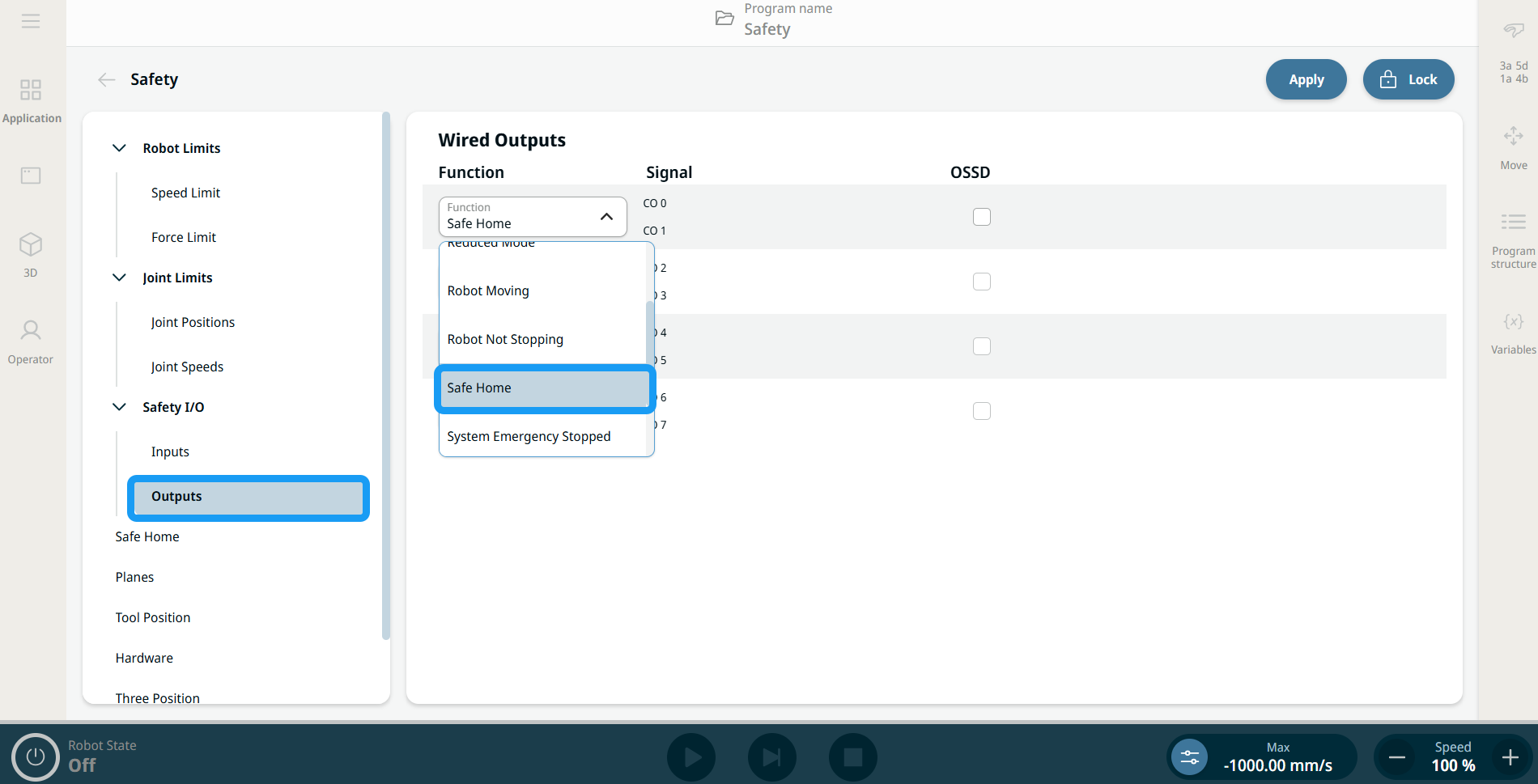
Hvis Hjem-posisjonen tildeles en posisjon med smart ferdighet i Sikkerhet, inneholder rullegardinmenyen for sikkerhetsutgangsfunksjonen Sikkert hjem som en ny funksjonstildeling. Velg Sikkert hjem i Funksjon-feltene i Utgang til Sikkerhet I/U.
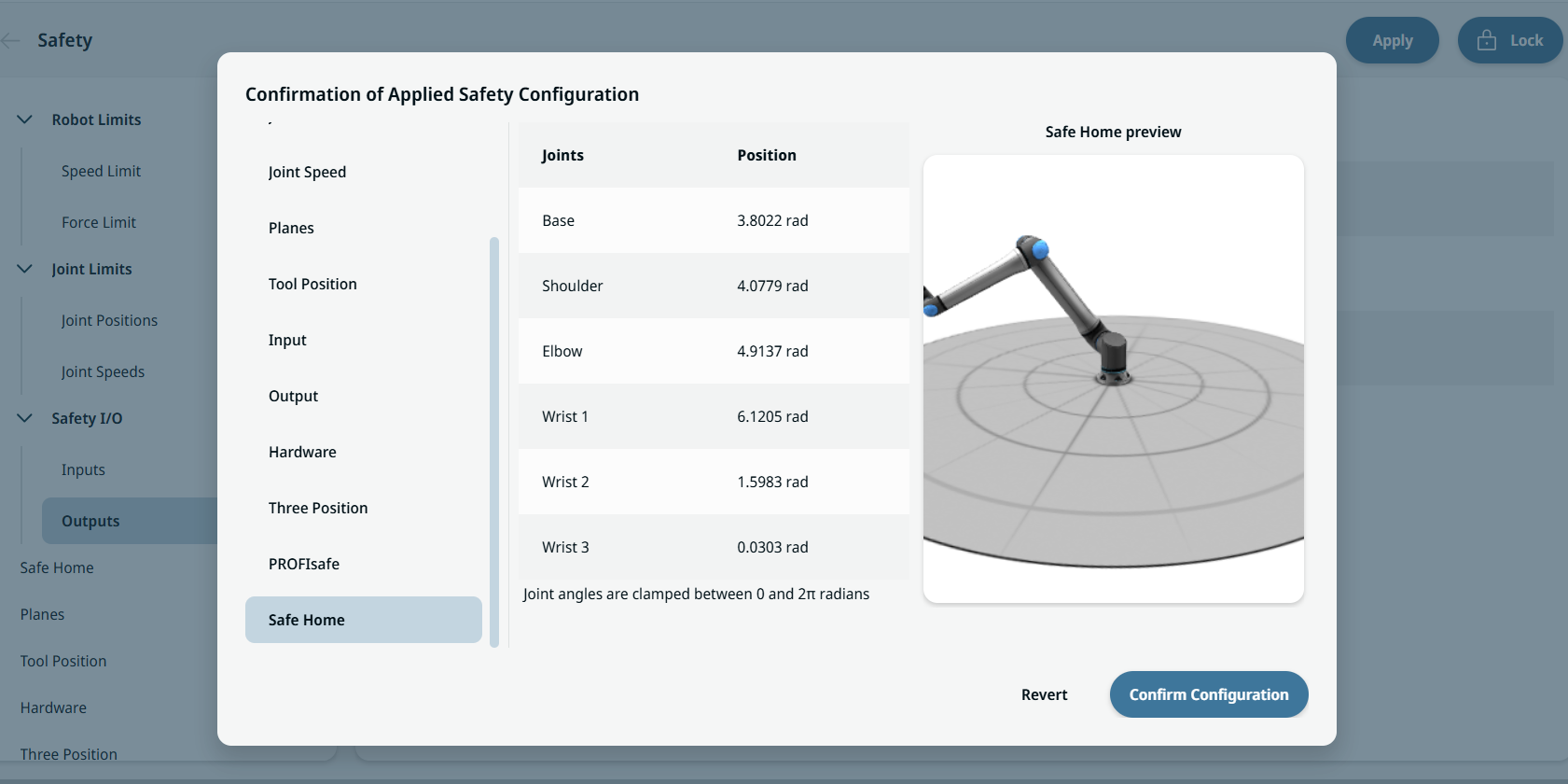
Sikkert hjem-funksjonen kan sees i tabellen over funksjonsoppdrag på oversiktsdialogen Bekreftelse på anvendt sikkerhetskonfigurasjon.
|
|
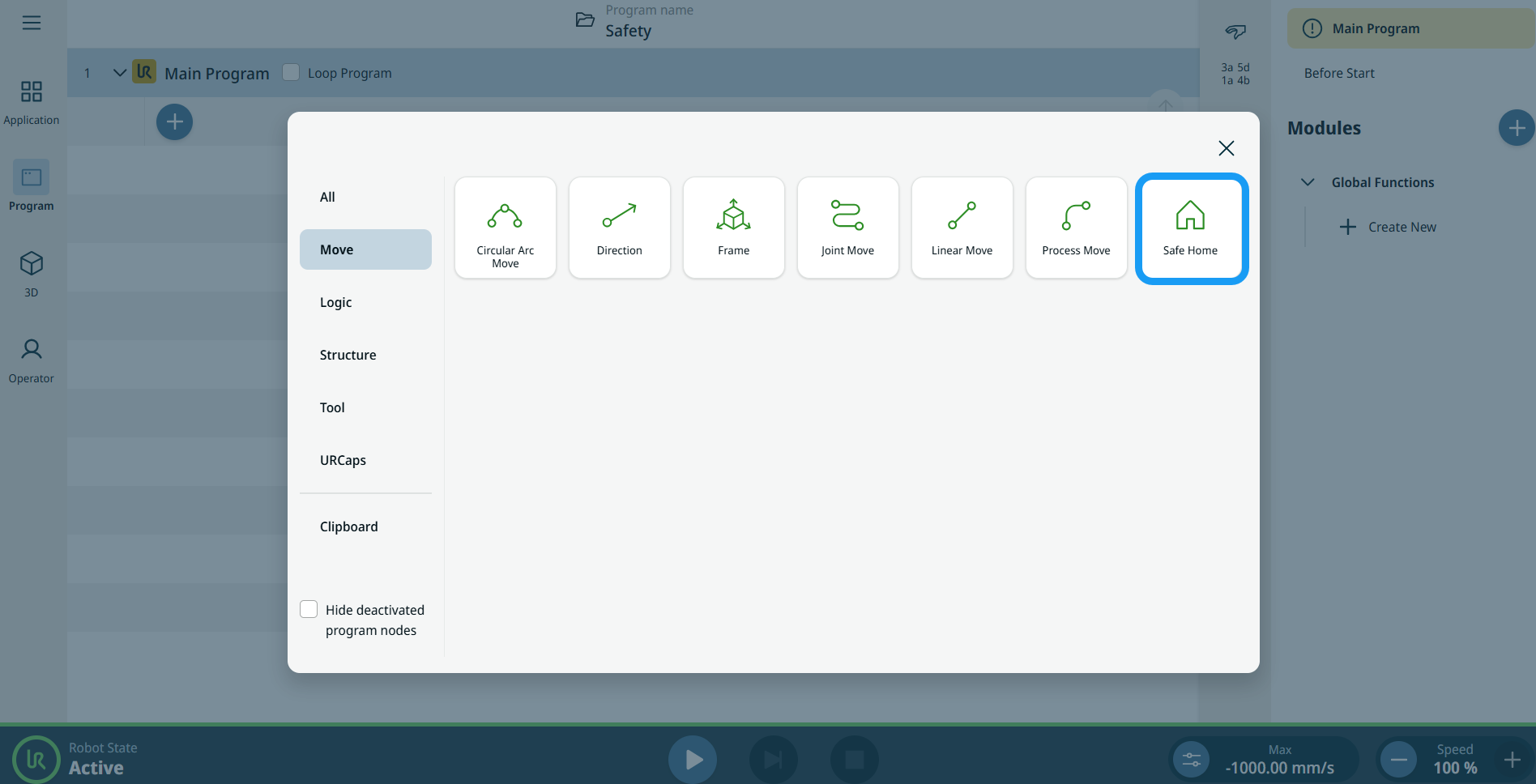
Sikkert hjem som en programnode |
Programnoden Sikkert hjem ligger under kategorien Flytt noder i Kommandonoder. Denne noden brukes til å kommandere roboten til å flytte til sin forhåndsdefinerte sikkert hjem-posisjon, som konfigurert i sikkerhetsapplikasjonsinnstillingene for sikkert hjem.
Å legge til noden uten en sikkert hjem-posisjon som er konfigurert i sikkerhet, markerer noden som gul.

Kommandonoden Sikkert hjem har alternativer for bevegelsesprofiler og andre avaserte innstillinger når ellipseikonet
|
 trykkes på.
trykkes på.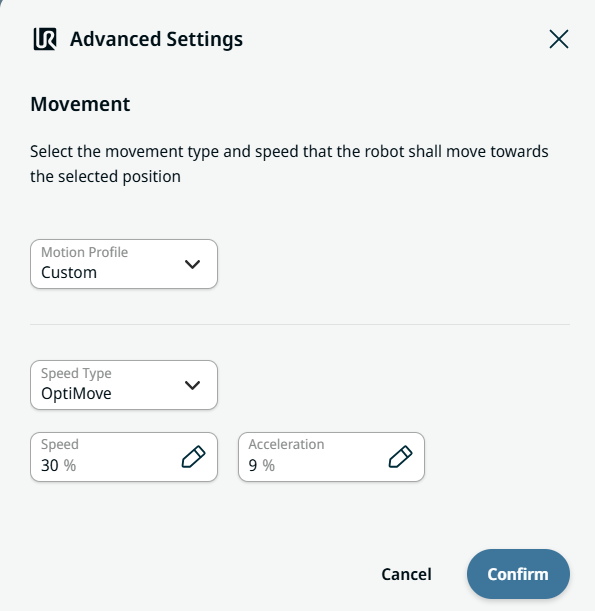
| Avanserte innstillinger |
Brukere kan opprette bevegelsesprofiler i Avanserte innstillinger ved å bruke de to fanene og to feltene:
Bevegelsesprofil er en funksjon som lar brukere sette forhåndsdefinerte bevegelsesprofiler i bevegelsesnoder: leddbevegelse, lineær bevegelse, sirkulær buebevegelse, prosessbevegelse og retning. Egendefinert bevegelsesprofil gjør det mulig for brukere å definere bevegelsesdata i bevegelsesnoden. I feltet Hastighetstype er OptiMove standardalternativet. Velg Classic bevegelse hvis du vil angi hastighet og akselerasjon i grader per sekund eller mm per sekund. OptiMove-innstillinger er angitt i prosent for å forenkle bruken og oppsettet. Brukere kan konfigurere prosent av foretrukket hastighet i Hastighet-fanen, som angir målets bevegelseshastighet som en prosentandel av robotens maksimale hastighetskapasitet. Brukere kan konfigurere prosenten av foretrukket akselerasjon i Akselerasjon-fanen, som angir målmomentgrenser under akselerasjon og retardasjon som en prosentandel av robotens maksimale kraft.
|