Robotarm
| Om robotarmen |
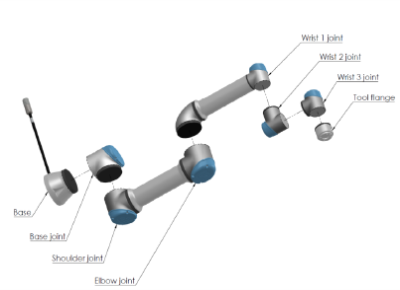
Ledd, base og verktøyflens er hovedkomponentene i robotarmen. Kontrolleren koordinerer leddbevegelse for å flytte robotarmen.
Festing av en endeeffektor (verktøy) til verktøyflensen i enden av robotarmen, tillater roboten å manipulere et arbeidsstykke. Noen verktøy har et spesifikt formål som går ut over å manipulere en del, for eksempel QC-inspeksjon, bruk av lim og sveising. |
|
Roboten er delvis fullført maskineri, derfor er en samsvarserklæring inkludert. En risikovurdering er nødvendig for hvert robotprogram.
|