OptiMove
| Beschrijving |
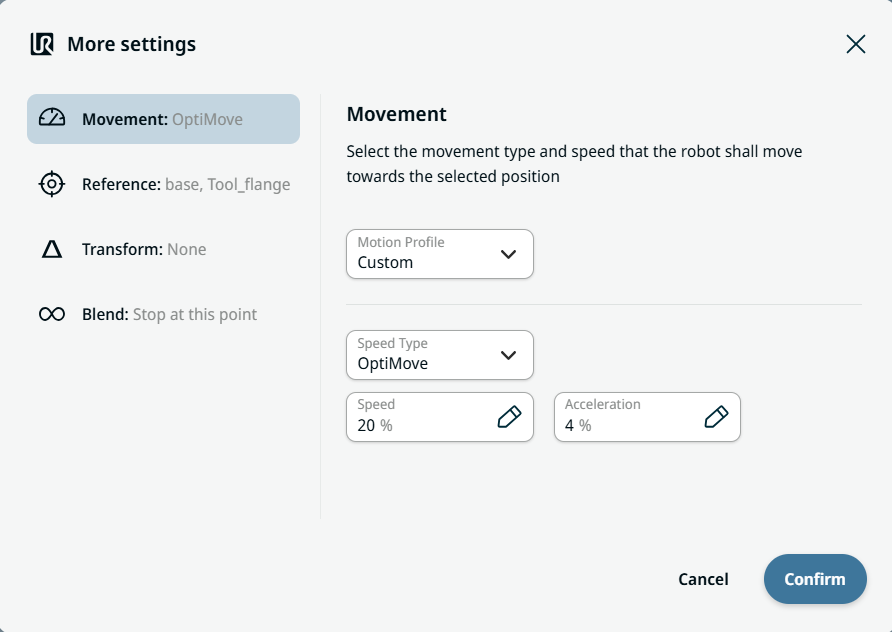
De OptiMove bewegingswaarde is een geavanceerde functie van de PolyScope X Joint en Linear Move commando's. Zie Gewrichtsbeweging en Lineaire beweging.
Met de OptiMove- profiteert u van de volgende voordelen:
Het gecombineerde effect van OptiMove leidt over het algemeen tot een kortere cyclus met vloeiendere bewegingen en minder belasting van de robot.
|
|
Toegang tot OptiMove |
|
|
|
|
|
|
|

 .
.