이동
| 설명 |
이동 명령을 사용하면 로봇이 포인트 A에서 포인트 B로 이동할 수 있습니다. 로봇이 움직이는 방식은 로봇이 수행할 작업에 중요합니다. 프로그램 트리에 이동을 추가하면 화면 오른쪽에 이동 창이 나타납니다. 이동 창의 옵션을 사용하여 이동 및 연결된 웨이포인트를 구성할 수 있습니다.
|
| 속도 설정 |
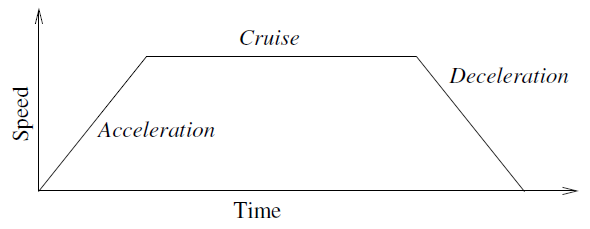
이동 유형에 적용되는 공유 매개변수는 최대 조인트 속도 및 조인트 가속도입니다.
|
|
OptiMove는 하드웨어 제한을 유지하면서 로봇의 속도와 가속도를 지정하는 모션 컨트롤 옵션입니다. 즉, 최적의 로봇 모션은 원하는 제한을 초과하지 않습니다. 따라서 100%는 하드웨어 제한 내에서 최대 속도 백분율과 가속도입니다.
|

| 이동 명령 |
이동 명령은 웨이포인트를 통해 로봇의 모션을 제어합니다. 프로그램에 이동 명령을 추가하면 웨이포인트가 자동으로 추가됩니다. 이동을 사용하여 웨이포인트 사이의 로봇 암 이동에 대한 가속도 및 속도를 설정할 수도 있습니다.
다음 섹션에 설명된 대로 로봇은 4개의 이동 명령을 사용하여 이동합니다.
|
|
조인트 각도 사용 옵션은 MoveJ를 사용하여 웨이포인트를 정의할 때 3D 포즈 대신 사용할 수 있습니다.
조인트 각도 사용을 이용하여 정의된 웨이포인트는 프로그램이 로봇 간에 이동할 때 변경되지 않습니다. 새 로봇에 프로그램을 설치하는 경우에 유용합니다.
조인트 각도 사용을 이용하면 TCP 옵션 및 특징을 사용할 수 없게 됩니다. |

|
로봇 프로그램 실행 중에 TCP를 변경해야 하는 경우 이 설정을 사용합니다. 로봇 프로그램에서 서로 다른 물체를 조작해야 하는 경우에 유용합니다. 어떤 TCP를 활성 TCP로 설정하느냐에 따라 로봇이 움직이는 방식이 조정됩니다. 활성 TCP 무시 이 움직임을 도구 플랜지와 관련하여 조정할 수 있습니다. |
|
| 이동 중에 TCP를 설정하려면 |
|
|
프로그램이 툴 좌표를 기억하도록 웨이포인트 사이에 특징을 사용할 수 있습니다. 이는 웨이포인트를 설정할 때 유용합니다(참조: 특징).
다음과 같은 경우에 특징을 사용할 수 있습니다. |
|
이동 화면의 아래 오른쪽 모서리에 있는 공유 매개변수는 로봇 암의 이전 위치부터 명령 아래의 첫 웨이포인트까지의 이동에 적용되고, 여기에서부터 다음에 오는 각 웨이포인트까지 적용됩니다. 이동 명령 설정은 이동 명령 하의 마지막 웨이포인트에서 출발하는 경로에 적용되지 않는다.
|