PROFIsafe
| 설명 |
PROFIsafe 네트워크 프로토콜(버전 2.6.1로 구현됨)을 통해 로봇은 ISO 13849, Cat 3 PLd 요구 사항에 따라 안전 PLC와 통신할 수 있습니다. 로봇은 안전 관련 정보를 안전 PLC로 전송하고, 안전 관련 정보를 수신합니다. 안전 관련 통신은 상태 메시지이거나 안전 기능(예: 설정 감소, 정지)을 트리거하는 것일 수 있습니다. 정지 명령은 IEC 60204-1에 따라 설명되어 있으며, 여기서 비상 정지는 카테고리 1 정지에 해당하고 안전 장치 정지는 카테고리 2 정지에 해당합니다.
PROFIsafe 인터페이스는 와이어를 로봇 컨트롤 박스의 안전 IO 핀에 연결하는 안전한 네트워크 기반 대안을 제공합니다. PROFIsafe 인터페이스를 사용하면 UR 로봇의 기능 안전 사양(PL, 카테고리 및 PFH)을 유지할 수 있습니다. 자세한 내용은 UR 매뉴얼의 “안전 기능 표” 섹션을 참조하십시오. 예를 들어, “안전 정지”는 PLd 카테고리 3에 해당하며, PFH 값은 1.8E-07(1.8 × 10⁻⁷) 미만입니다.
PROFIsafe는 활성화 라이센스가 있는 로봇에서만 사용할 수 있으며 현지 영업 담당자에게 문의하여 얻을 수 있습니다. 라이선스를 받은 후에 myUR에서 다운로드하십시오. 로봇 등록 및 라이선스 활성화에 관한 정보는 "로봇 등록 및 URCap 라이선스 파일"을 참조하십시오.
|
| 안전 PLC 입력 |
로봇이 안전 PLC로 보내는 상태 메시지에는 다음 표에 표시된 정보가 포함됩니다.
|
||||||||||||||||
|
|
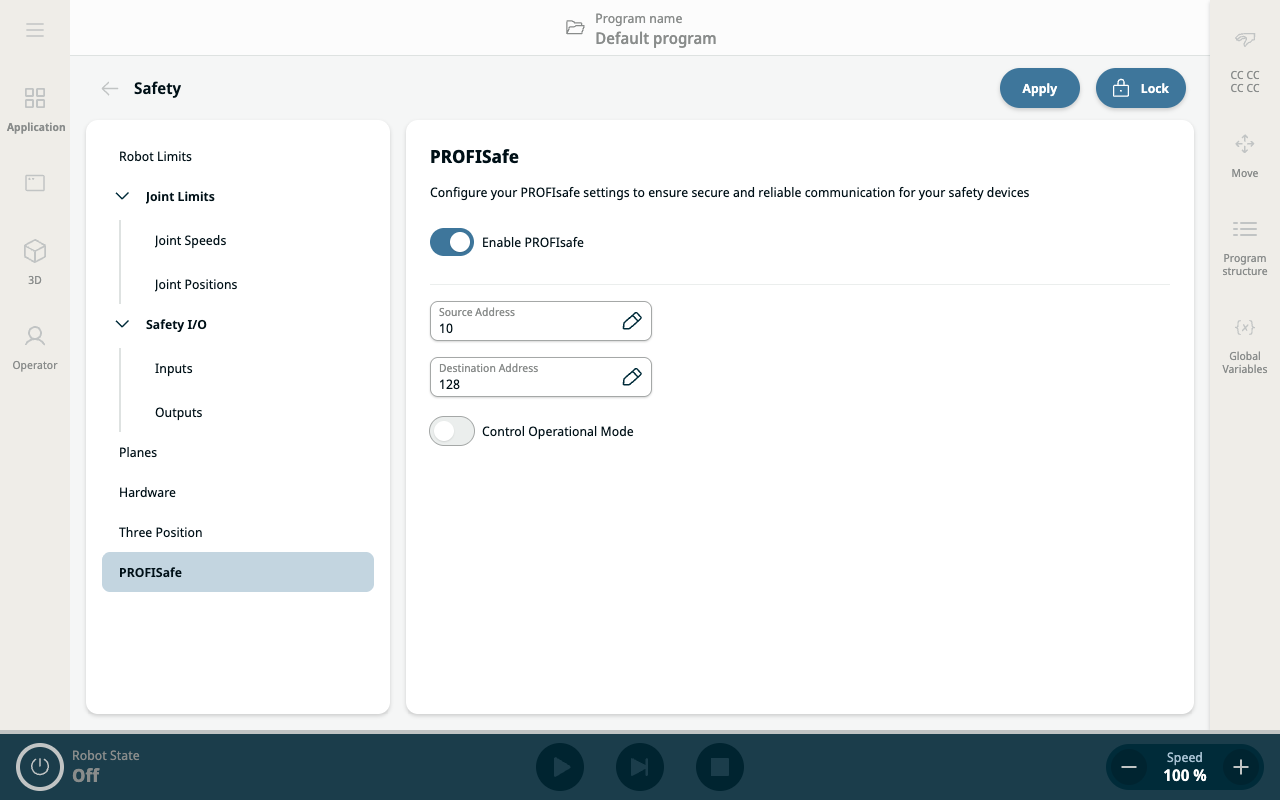
| PROFIsafe 구성 |
|
|
|
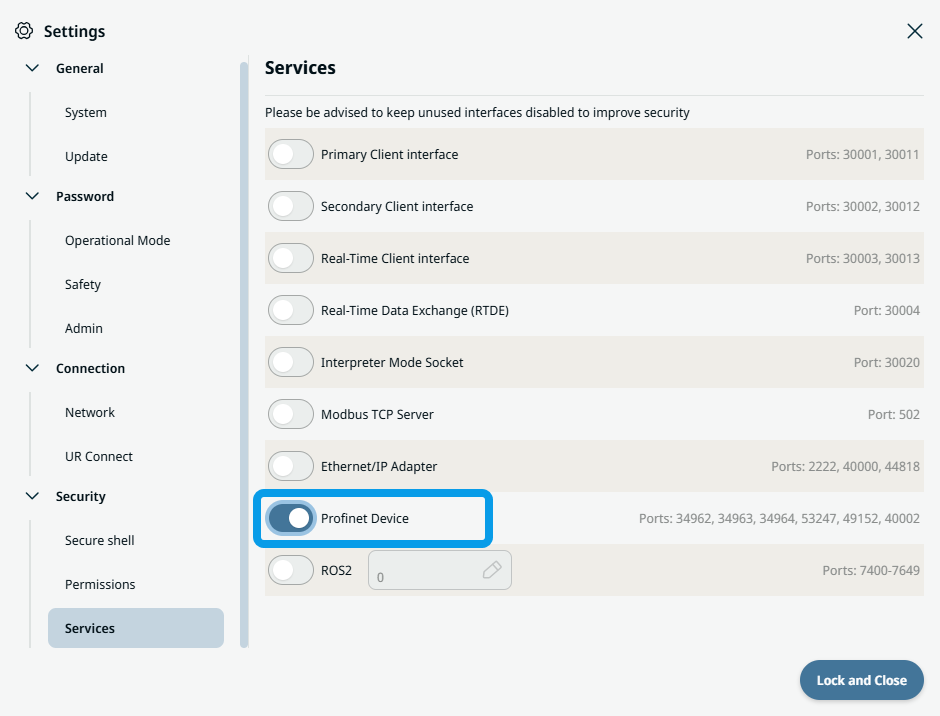
PROFIsafe를 구성하고 사용하려면 보안 서비스 설정 메뉴에서 Profinet 장치를 활성화해야 합니다.
 자세한 내용 및 "Profinet" 인터페이스 위치를 확인하십시오.
|