툴 위치 제한
| 설명 |
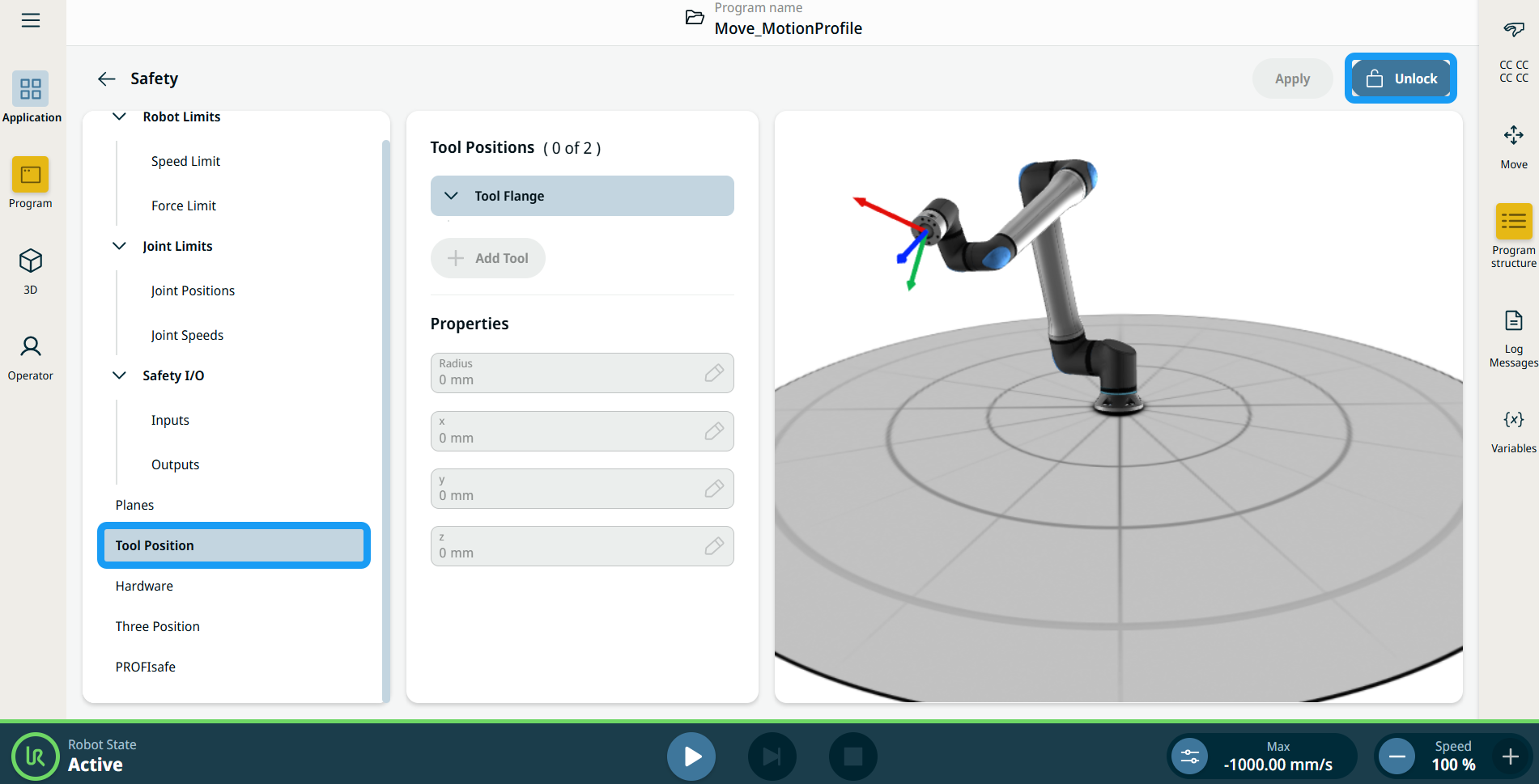
툴 위치 화면에서는 사용자가 로봇 암 끝에 놓인 툴 및/또는 액세서리를 보다 제어된 방식으로 제한할 수 있습니다. 툴 위치와 플레인의 충돌 감지 또는 툴이 플레인으로 들어갈 때 감소 모드로 전환하는 방식으로 안전 플레인과 상호 작용하는 반경을 사용하여 툴 위치를 정의할 수 있습니다.
|
| 세부 사항 |
툴 위치에는 두 가지 주요 장점이 있습니다.
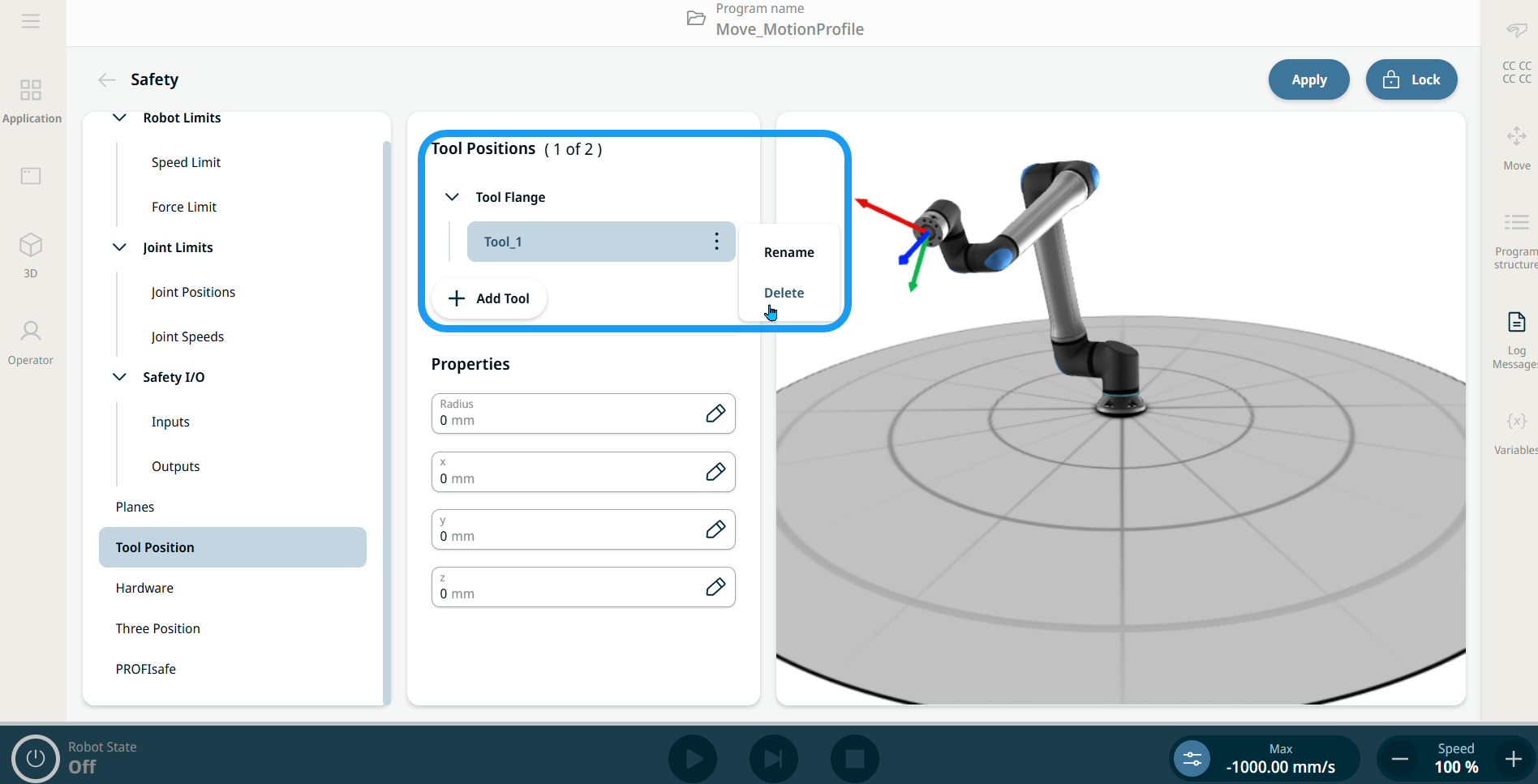
최대 두 개의 툴 위치를 정의, 구성 및 관리할 수 있습니다.
|
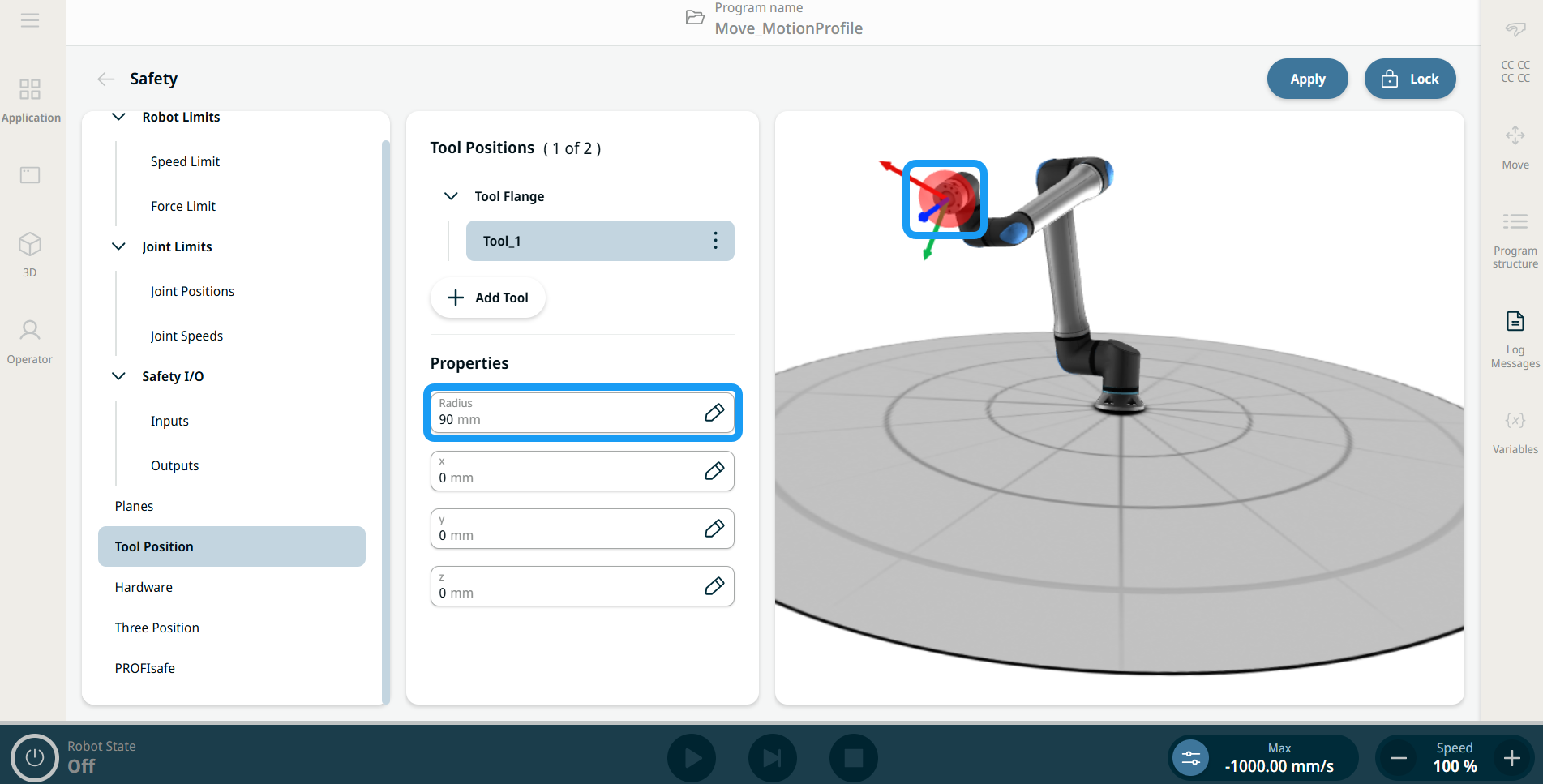
| 사용자 정의 툴 |
사용자가 정의한 도구의 경우, 사용자는 다음을 변경할 수 있습니다.
|
|
툴 위치에 액세스하려면 |
|
|
|
|
|
|
|