安全 I/O
| 表
|
以下に機能的な違いを示します。
|
| 安全上の注意
|
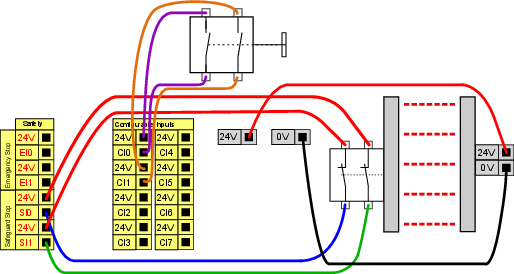
構成可能な I/O を、緊急停止出力など、追加的な安全 I/O 機能を設定するために使用します。 PolyScope インターフェイスを使用して、安全機能用の構成可能な I/O セットを定義します。 定期的に安全機能の検証および試験を行わないと、危険な状況につながる恐れがあります。
|
| OSSD 信号 |
構成済みの安全入力および恒常的な安全入力はすべてフィルターにかけられ、3ms未満のパルス幅でOSSD安全機器を使用できるようにしています。 安全入力は1ミリ秒毎にサンプリングされ、入力の状態を最終7ミリ秒間の間に最も多く確認された入力信号により判定します。
|

| デフォルト安全構成 |
ロボットは、安全機器を追加することなく運用できるデフォルト構成でお届けします。
|

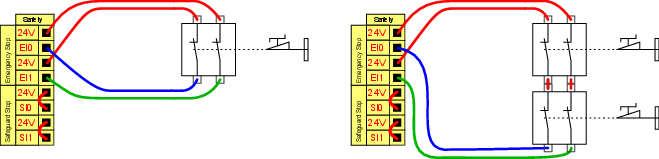
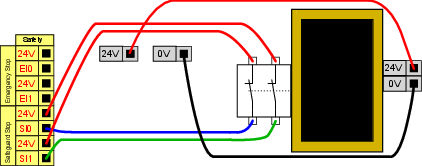
| 緊急停止ボタンの接続 |
ほとんどの応用において 1 つ以上の追加緊急停止ボタンを必要とします。 以下の図は 1 つ以上の緊急停止ボタンを接続する方法を示しています。
|
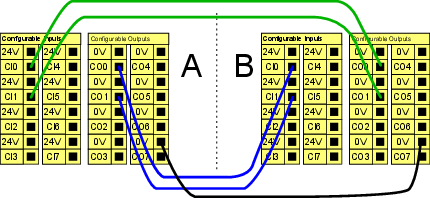
| 自動再開付き予防停止 |
この構成はオペレーターがドアを通り、後ろで閉められないときにのみ使用できます。 構成可能な I/O は、ドア外部にロボットの運動を再開するためのリセットボタンを設定する目的で使用されます。 ロボットは信号が回復した場合に自動的に運動を再開します。 安全境界線の内側から信号が回復できる場合は、この構成を使用しないでください。
|
|
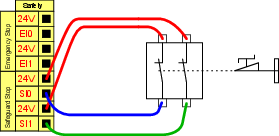
リセットボタンでの予防停止 |
光カーテンとの対話するために予防インターフェースを使用する場合は、安全境界線の外部にリセットボタンが必要です。 リセットボタンには必ず 2 チャンネルタイプを使用してください。 この例では、リセット用に構成された I/O は CI0-CI1 です。
|