PolyScope X の概要
| 概要 |
PolyScope X は、タッチ画面経由でロボットアームを操作できる、ティーチペンダントにインストールされているグラフィカルユーザーインターフェース(GUI)です。 PolyScope X インターフェースを使用すると、プログラムを作成、読み込み、実行できます。 ソフトウェアは常に最新バージョンに更新してください。
|
| メイン画面の表示方法 |
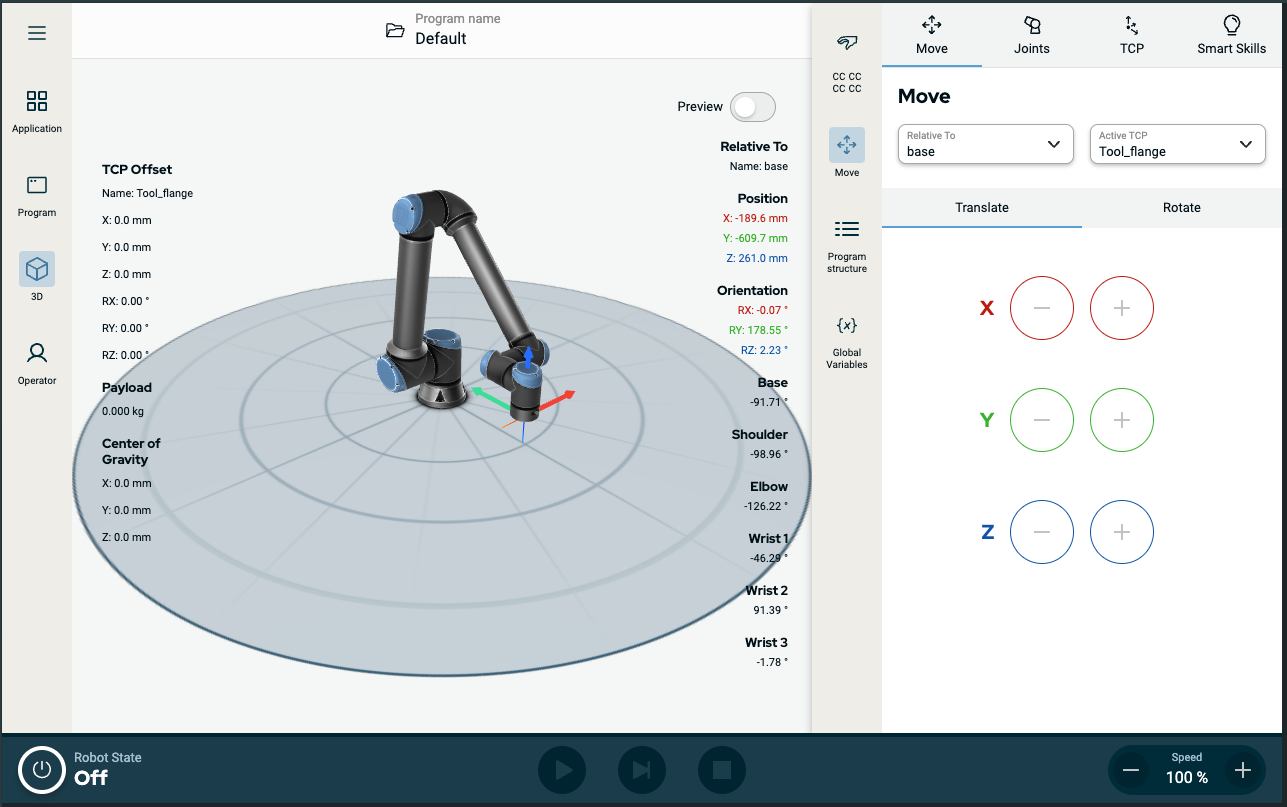
|
 をタップします。 これにより、ロボットアームを X-Y-Z 座標で 3 次元表示できます。
をタップします。 これにより、ロボットアームを X-Y-Z 座標で 3 次元表示できます。




| 画面の組み合わせ |
ロボットの操作画面はメイン画面とマルチタスク画面からなります。 マルチタスク画面はメイン画面から独立しているため、個別のタスクを実行できます。 例えば、マルチタスク画面でロボットアームを動かしながら、メイン画面でプログラムを設定できます。 必要ない場合は、マルチタスク画面を非表示にすることもできます。
|
| マルチタスク画面を表示/非表示にする |
|