Joint Move
| 説明 |
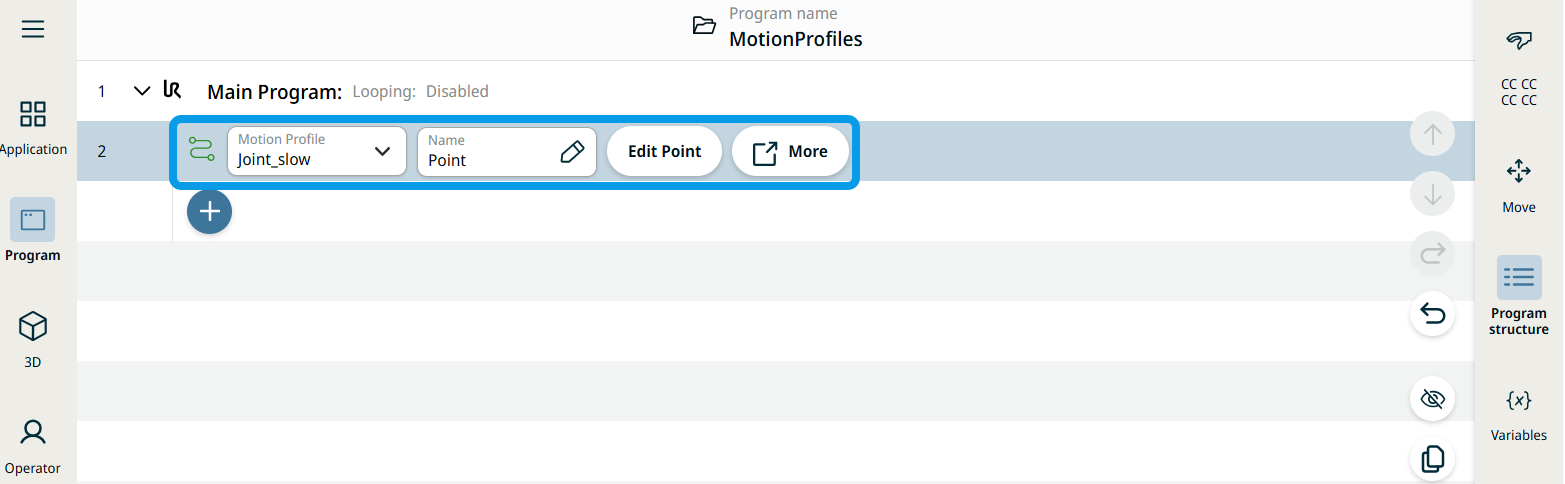
The Joint Move works in a similar way to Move to command, but it supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. この移動は、A から B への直線とは限りませんが、ジョイントの開始位置とジョイントの終了位置には最適です。 Joint Move makes movements that are calculated in the robot arm joint space. ジョイントは同時に移動を完了するように制御されています。 この移動タイプでは、ツールがたどるための曲線のパスを描きます。
|
|
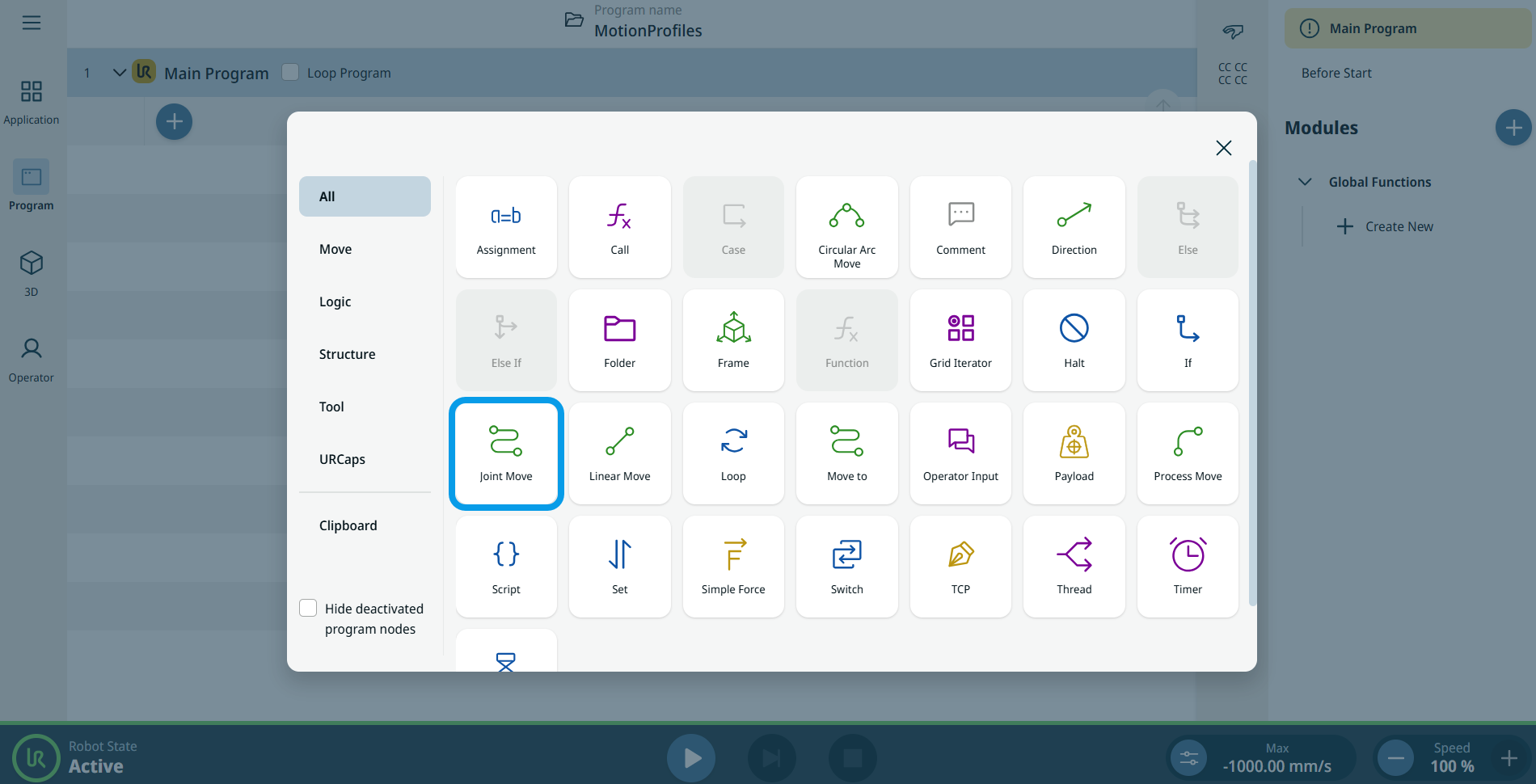
To access Joint Move command |
|
|
|
|
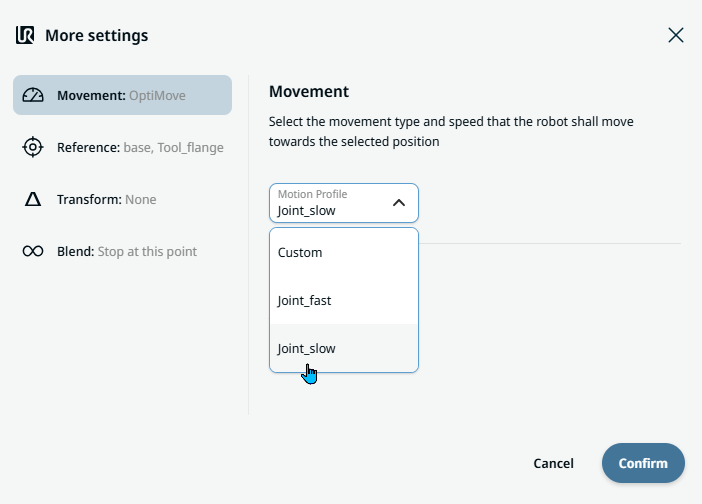
| Movement setting |
|
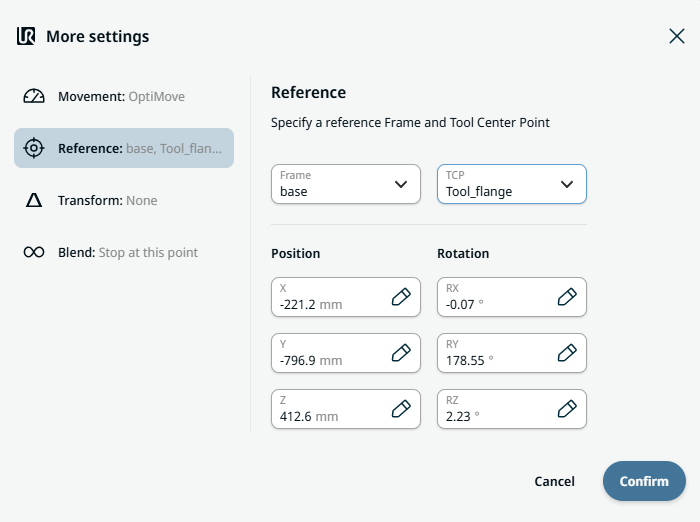
| Reference setting |
|
| Transform setting |
|
|
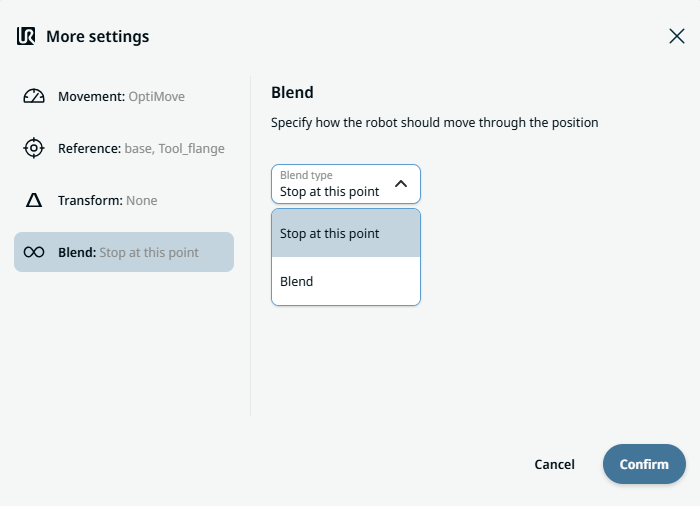
Blend setting |
|