特異点
| 説明 |
特異点とは、ロボットの動きと配置能力を制限するポーズです。 ロボットアームが特異点に近づいたり離れたりする際に、動作が停止したり、予期せず急な動きをしたりすることがあります。 作業空間へのロボットの配置や動作範囲の定義を行う際は、以下に詳述する特異点の位置を考慮することが重要です。 特異点付近でのロボットの動きが、ロボットアーム、エンドエフェクター、およびワークピースの範囲内にいる人物に危険を及ぼさないことを確認します。
ロボットアームに特異点が発生する原因は次のとおりです。
|
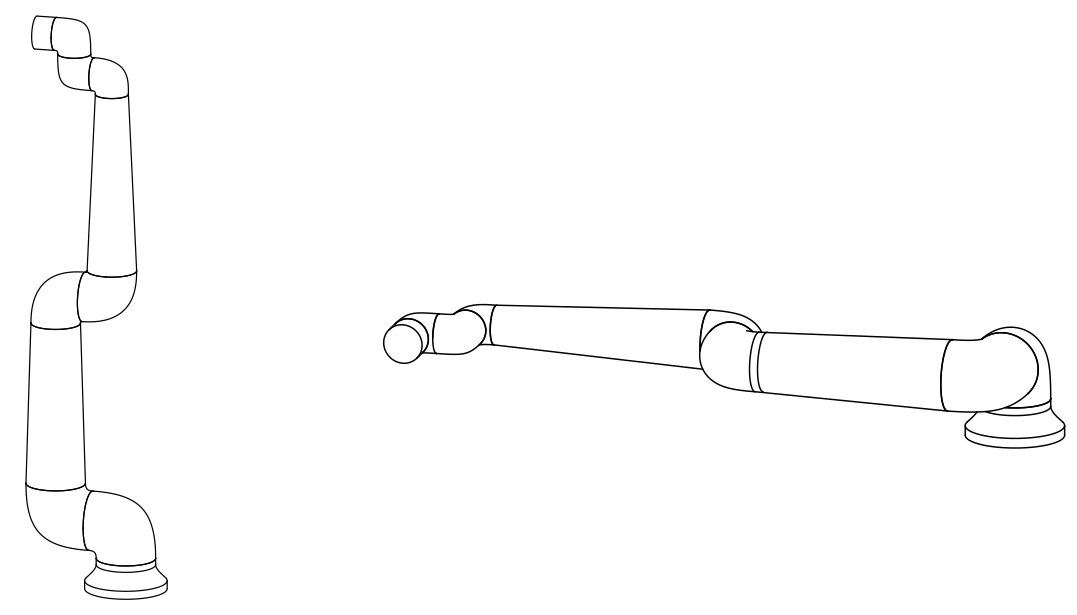
| 外部作業空間の制限
|
特異点は、ロボットが十分遠くまで到達できないか、最大作業空間外に到達するために発生します。
回避策: ロボットが推奨作業空間の外側に到達しないように、ロボットの周囲に機器を配置します。
|
| 内部作業空間の制限
|
特異点は、動きがロボットベースの真上または真下にあるために発生します。 これにより、多くの位置/方向に到達できなくなります。
回避策:中央シリンダー内またはその近くで作業する必要がないようにロボットタスクをプログラムします。 また、ロボットのベースを水平面に取り付けて、中央のシリンダーを垂直方向から水平方向に回転させ、タスクの重要な領域から遠ざけるという手もあります。
|
| リストの位置合わせ
|
この特異点は、リストジョイント 2 がショルダー、エルボー、リストジョイント 1 と同じ平面上で回転するために発生します。 これにより、作業空間に関係なく、ロボットアームの移動範囲が制限されます。
回避策: ロボットのリストジョイントをこのように調整する必要がないようにロボットタスクを行います。 また、ツールの角度を調整して、リストの位置合わせの問題を避けツールを水平に向けることもできます。
|