Dimensionamento del supporto
| Descrizione |
La struttura (supporto) su cui è montato il braccio del robot è una parte cruciale dell'installazione del robot. Il supporto deve essere robusto e privo di vibrazioni provenienti da fonti esterne.
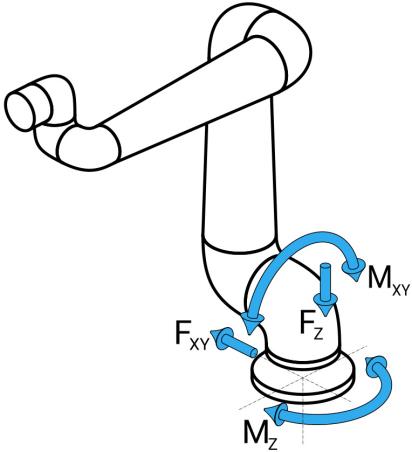
Ogni giunto del robot produce una coppia che sposta e arresta il braccio del robot. Durante il normale funzionamento ininterrotto e durante il movimento di arresto, le coppie dei giunti vengono trasferite al supporto del robot come:
Definizione di forza e momento sulla flangia di base. |
|
Dimensionamento del supporto |
L'entità dei carichi dipende dal modello di robot, dal programma e da vari altri fattori. Il dimensionamento del supporto deve tenere conto dei carichi generati dal braccio del robot durante il normale funzionamento ininterrotto e durante il movimento di arresto di categoria 0, 1 e 2.
Durante il movimento di arresto, i giunti sono autorizzati a superare la coppia massima di funzionamento nominale. Il carico durante il movimento di arresto è indipendente dal tipo di categoria di arresto. I valori indicati nelle seguenti tabelle sono i carichi nominali massimi nei movimenti più estremi moltiplicati per un fattore di sicurezza di 2,5. I carichi effettivi non supereranno questi valori.
Coppie massime del giunto durante gli arresti di categoria 0, 1 e 2.
Coppie massime del giunto durante il normale funzionamento.
I normali carichi di esercizio possono generalmente essere ridotti abbassando i limiti di accelerazione dei giunti. I carichi operativi effettivi dipendono dall'applicazione e dal programma del robot. È possibile utilizzare URSim per valutare i carichi previsti nella propria applicazione specifica. |
Margini di sicurezza |
È possibile incorporare margini di sicurezza aggiuntivi, tenendo conto delle seguenti considerazioni di progettazione:
|