Per accedere a OptiMove
-
Go to the main program screen. Vedere
-
Toccare l'icona Joint Move o Linear Move nella casella degli strumenti Comandi.

A node is inserted into the program tree. Il nodo presenta due campi modificabili e due schede, oltre a un'icona con i puntini di sospensione
 .
.
-
Tocca l'icona con i puntini di sospensione e apparirà la schermata Altre impostazioni.

-
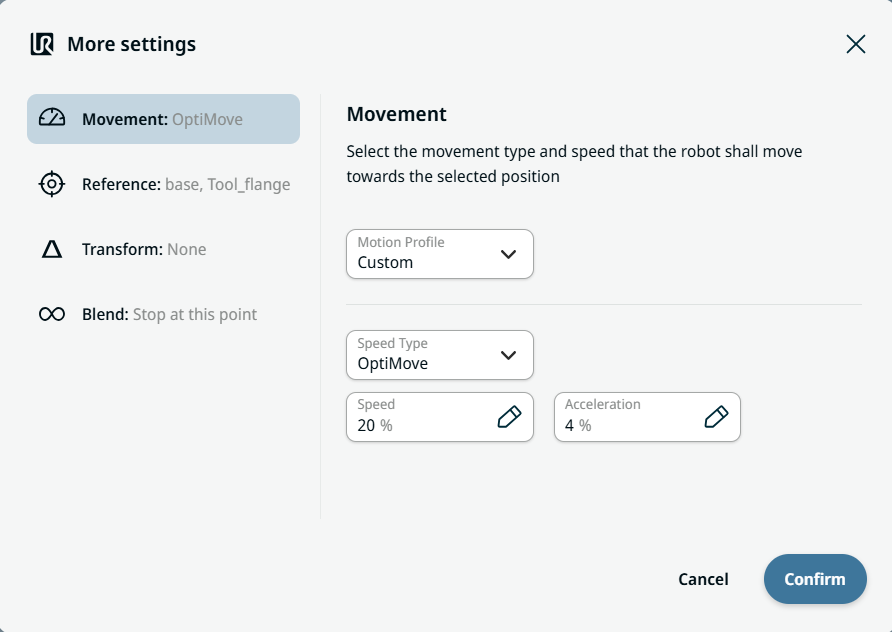
Tocca Movimento sul lato sinistro dello schermo.
Sul lato destro compaiono due schede e dei campi:
-
Profilo di movimento
-
Tipo di velocità
-
Scheda Velocità
-
Scheda Accelerazione
-
-
Nel campo Motion Value , OptiMove è l'opzione predefinita. Scegliere il movimento " " o " " se si desidera specificare velocità e accelerazione in gradi al secondo o in mm al secondo.
-
Visita il sito OptiMove.
Le impostazioni di OptiMove sono specificate in percentuale per semplificarne l'uso e la configurazione.
-
Nella scheda Speed inserisci la percentuale della velocità desiderata e tocca Conferma.
La scheda Velocità imposta la velocità di traslazione desiderata come percentuale della velocità massima del robot.
-
Nella scheda Acceleration inserisci la percentuale di accelerazione desiderata e tocca Conferma.
La scheda Accelerazione imposta i limiti di coppia target durante l'accelerazione e la decelerazione come percentuale della potenza massima del robot.