Safe Home
| Descrizione |
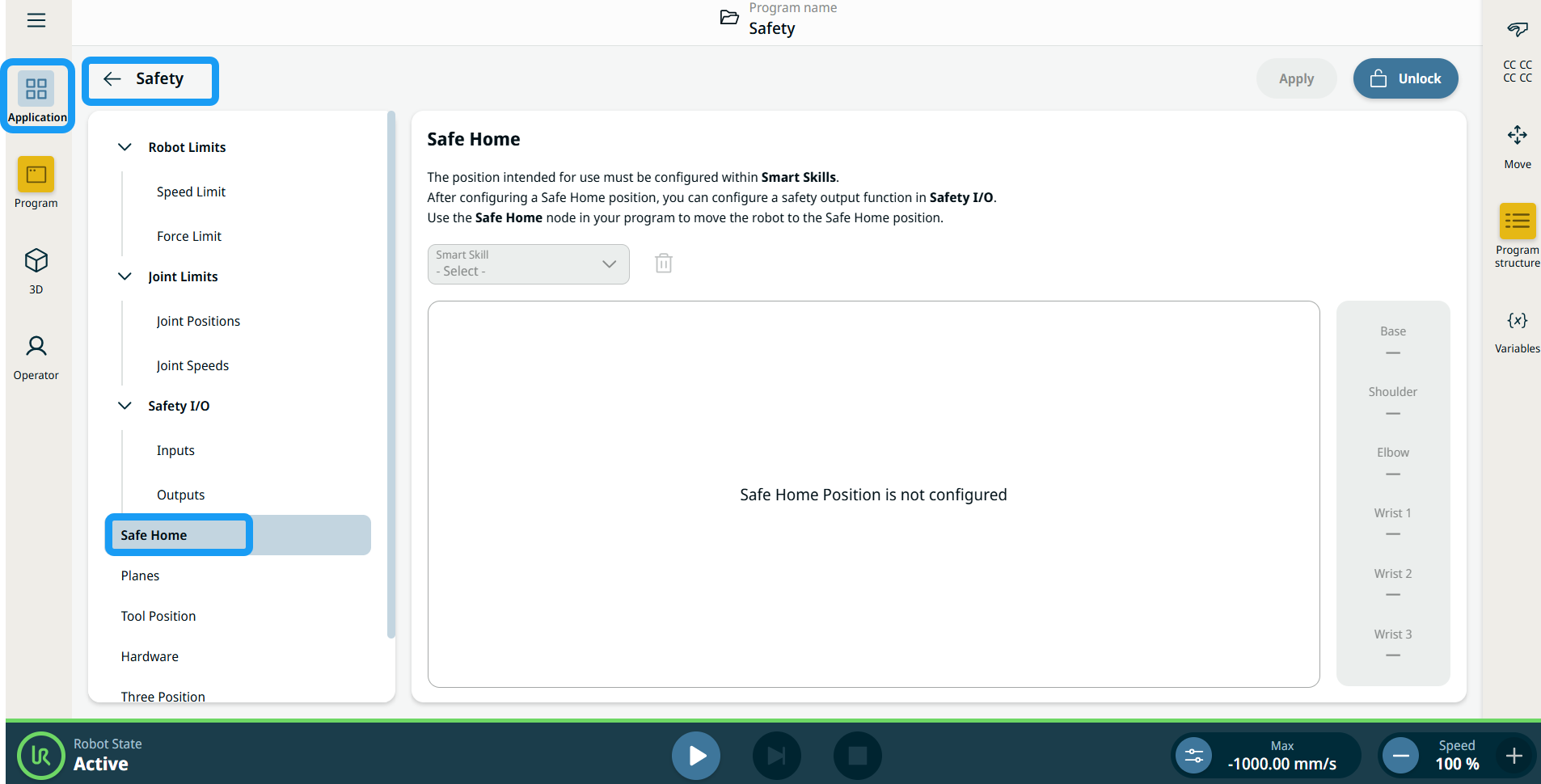
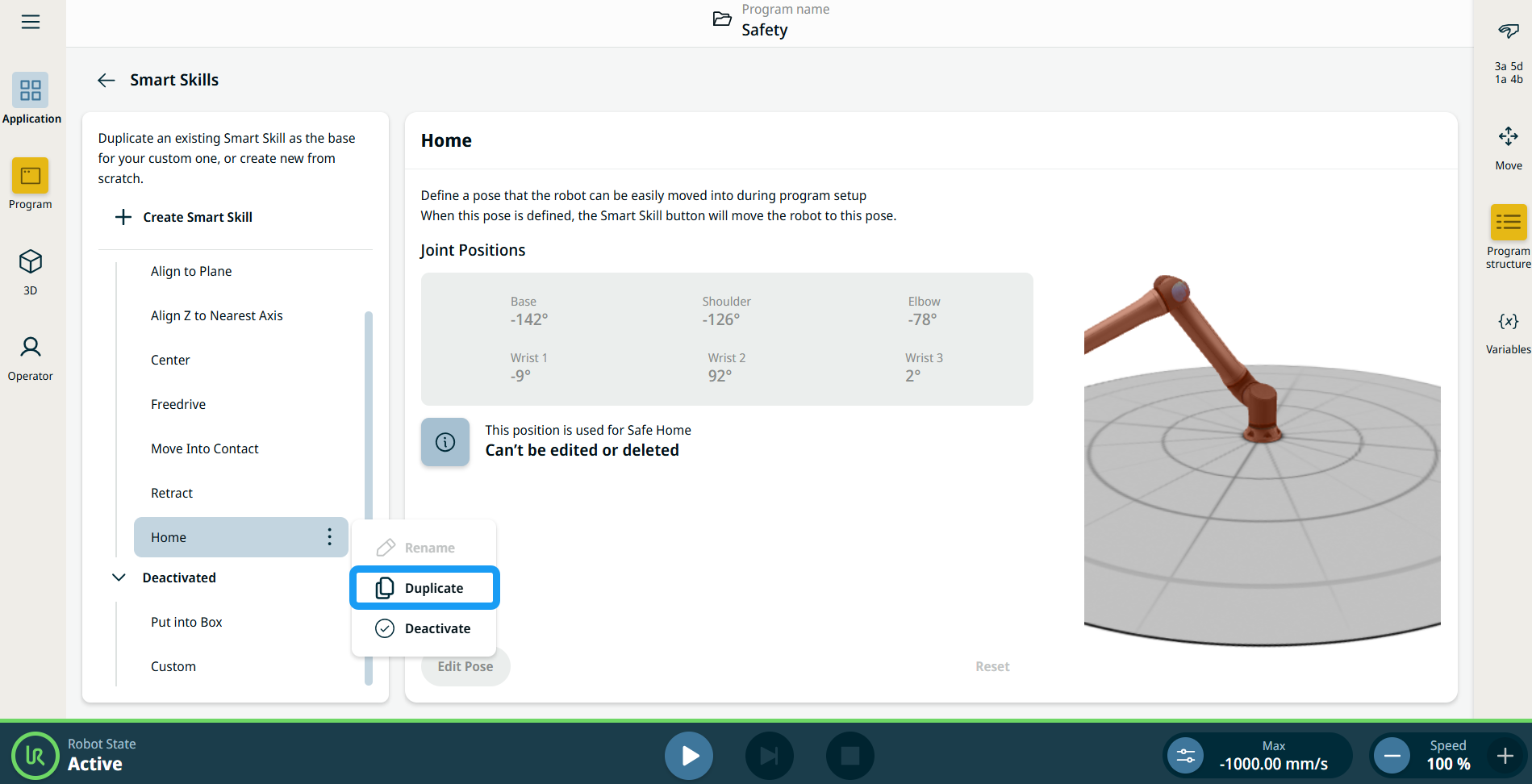
Posizione principale di sicurezza è una funzione di PolyScope X che consente agli utenti di definire un output relativo alla sicurezza che si attiva quando il robot raggiunge la posizione principale di sicurezza configurata. L'utente sceglie Home nel menu a discesa delle posizioni di abilità smart disponibili, che può essere assegnata come riferimento per la posizione principale di sicurezza.
|
|
Accedere alla posizione principale di sicurezza |
|
|
|
|
|
|
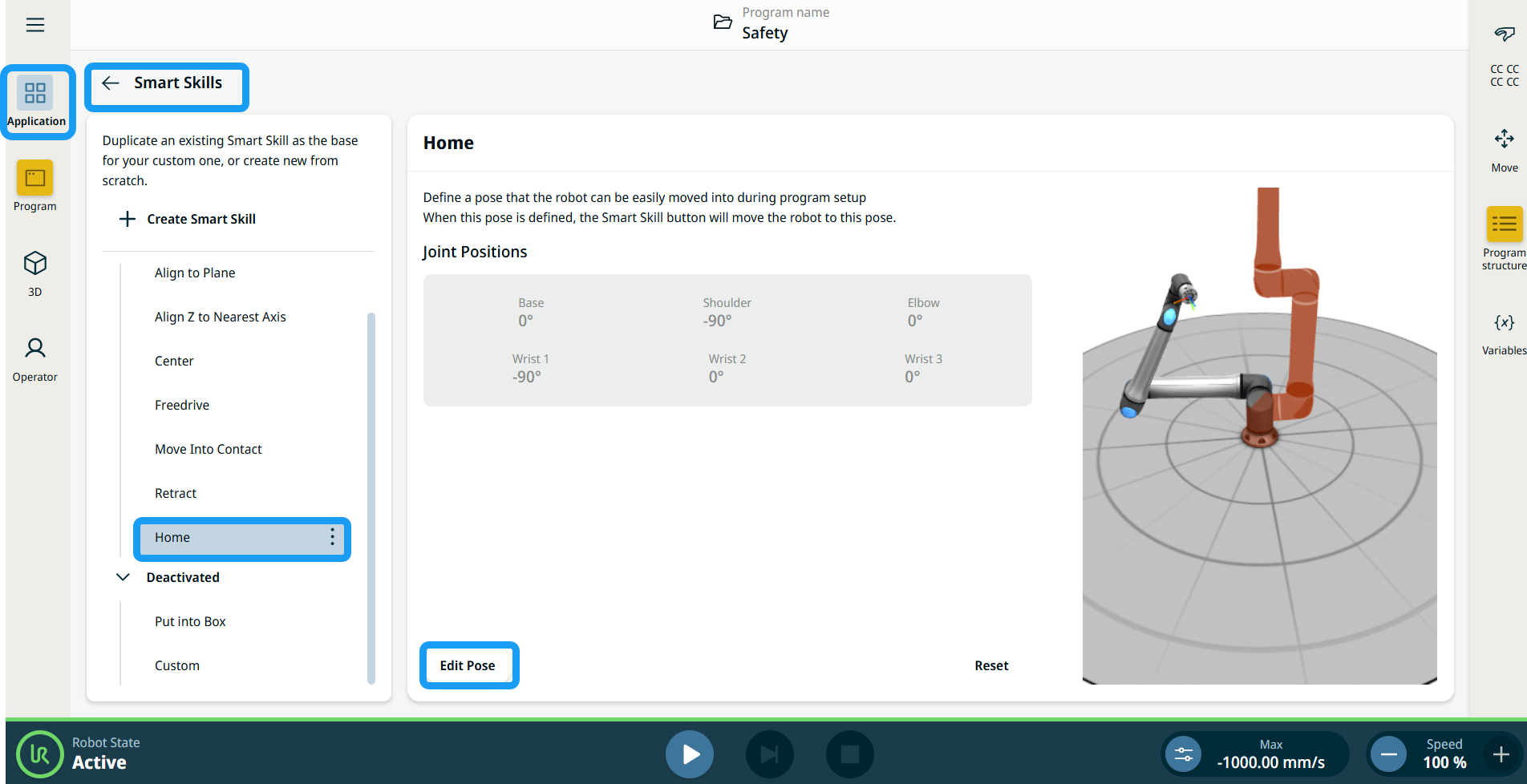
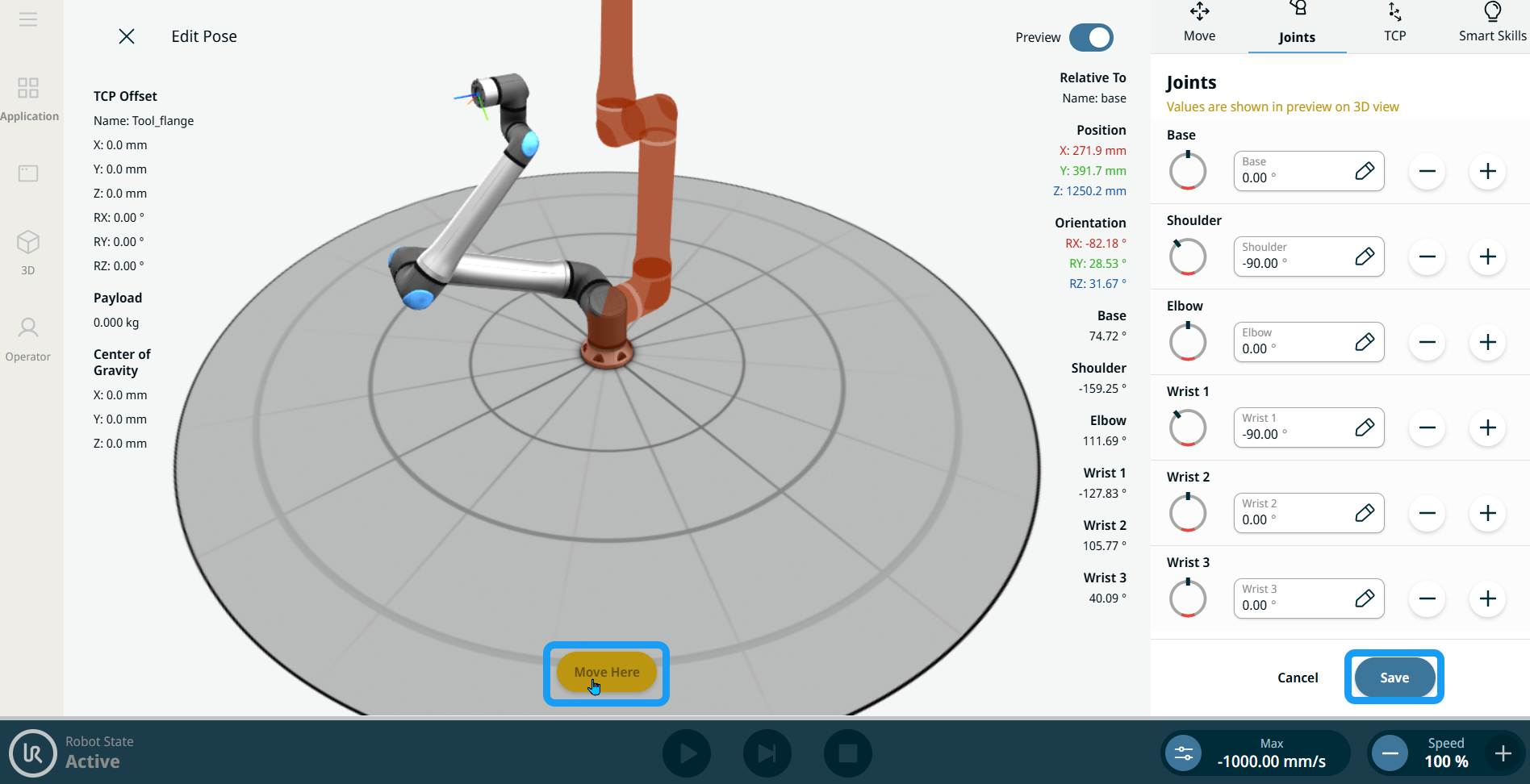
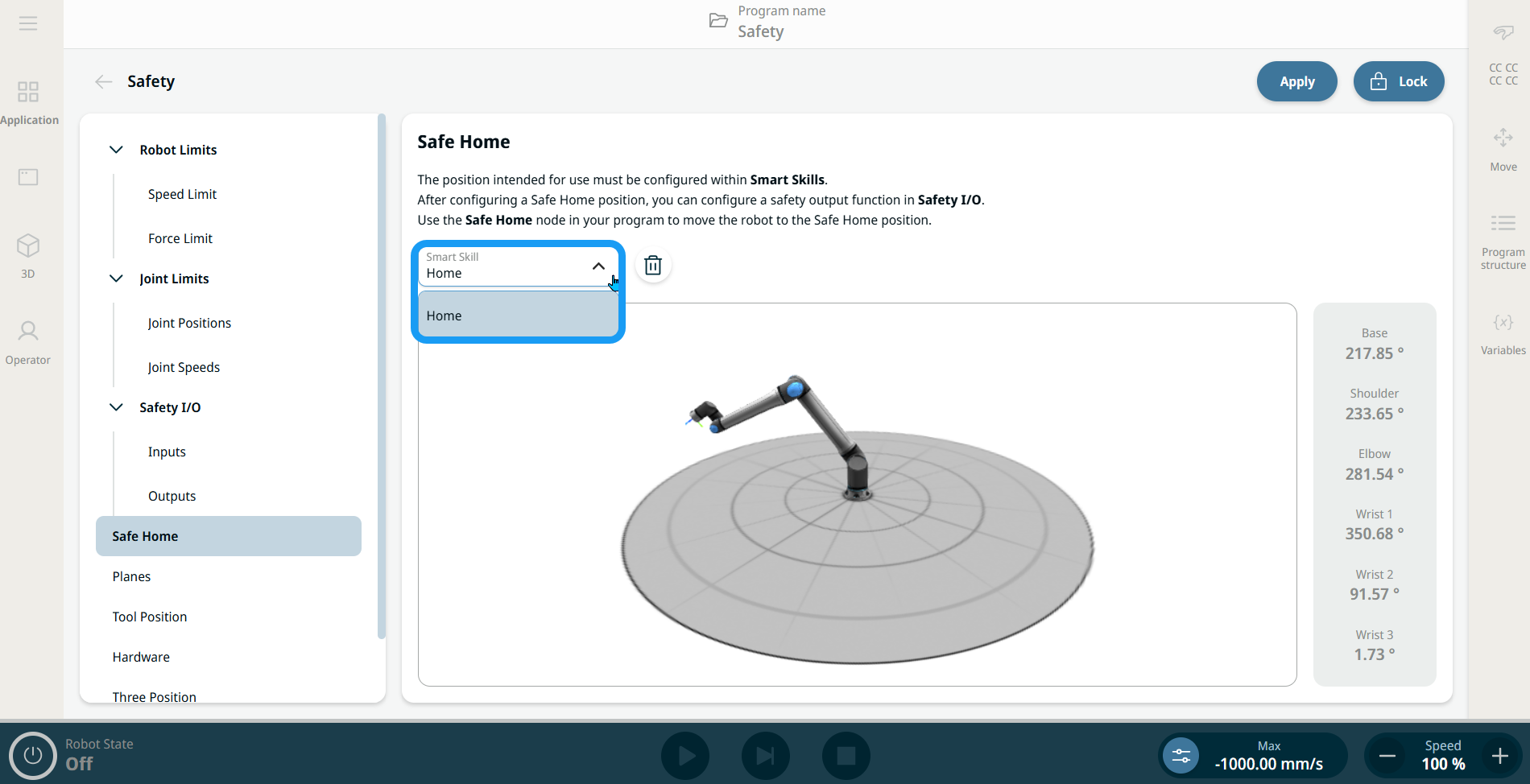
Se l'abilità smart di posizione è selezionata come riferimento di posizione per posizione principale di sicurezza:
|
|
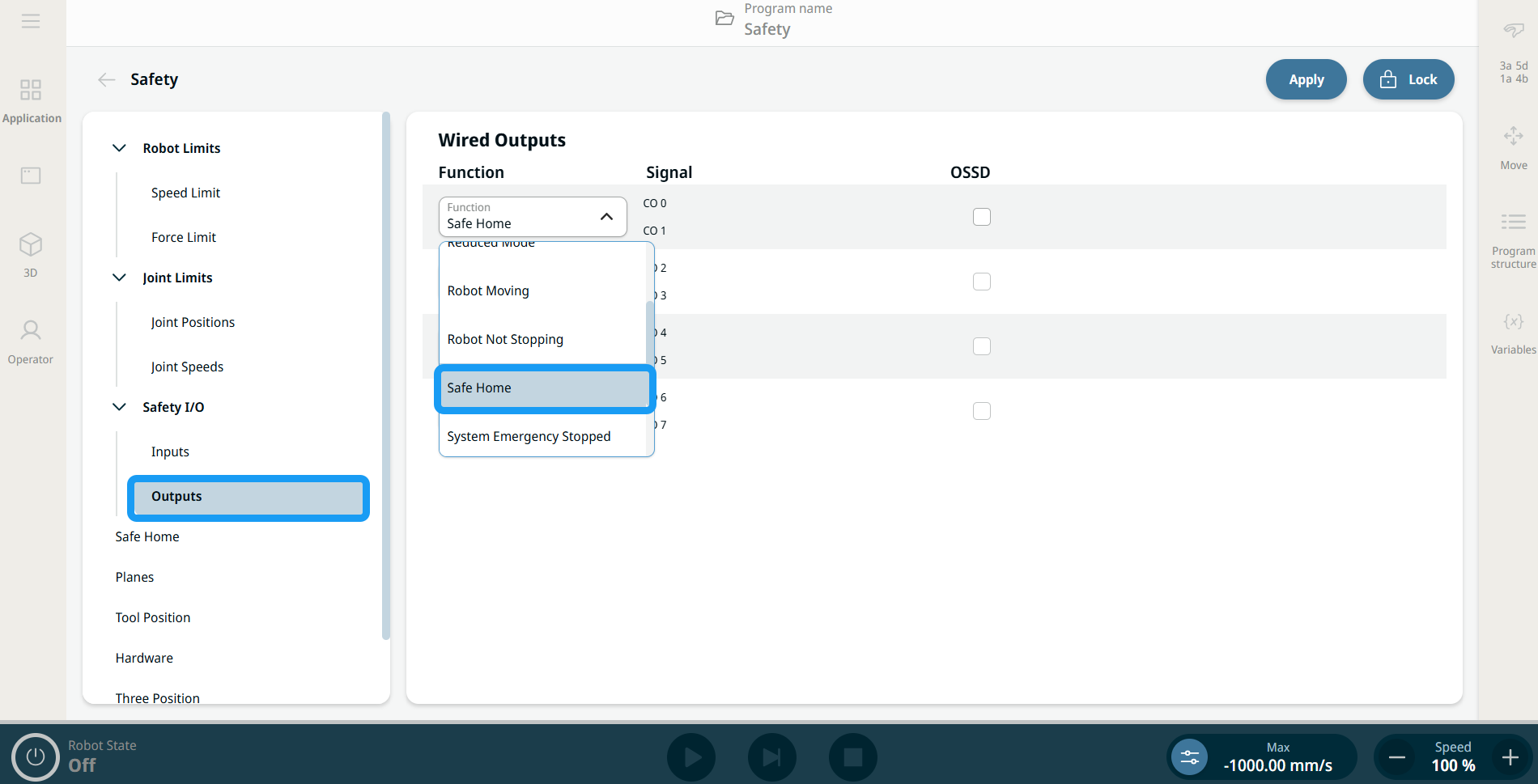
Funzione Posizione principale di sicurezza nelle uscite |
Se la posizione Home è assegnata a un'abilità smart di posizione nella sezione Sicurezza, il menu a tendina della funzione di uscita di sicurezza contiene Posizione principale di sicurezza come nuova assegnazione di funzione. Scegliere Posizione principale di sicurezza nei campi Funzione in Uscitedi I/O di sicurezza.
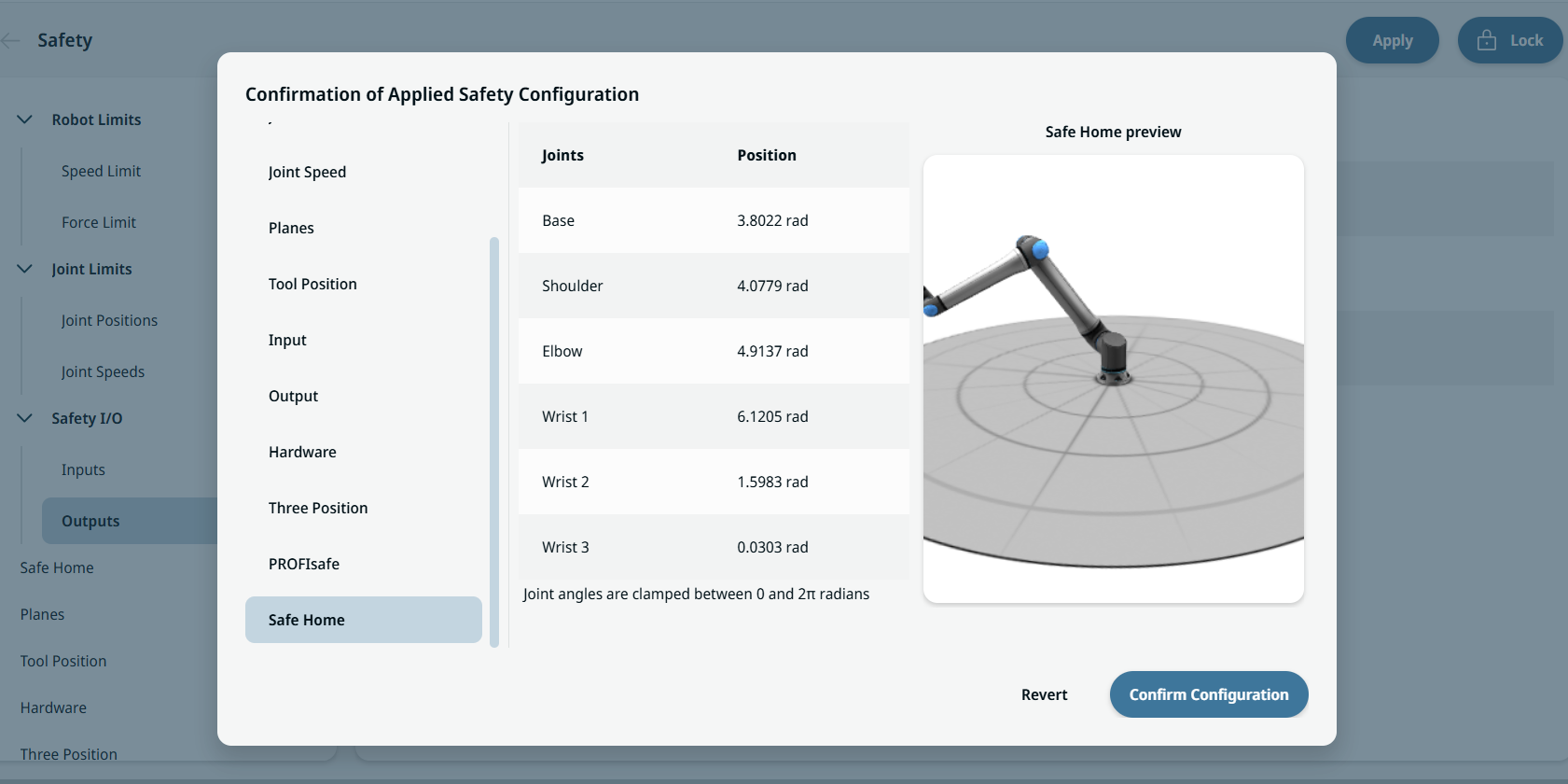
Posizione principale di sicurezza è visibile nella tabella di assegnazione delle funzioni nella finestra di dialogo panoramica Conferma della configurazione di sicurezza applicata.
|
|
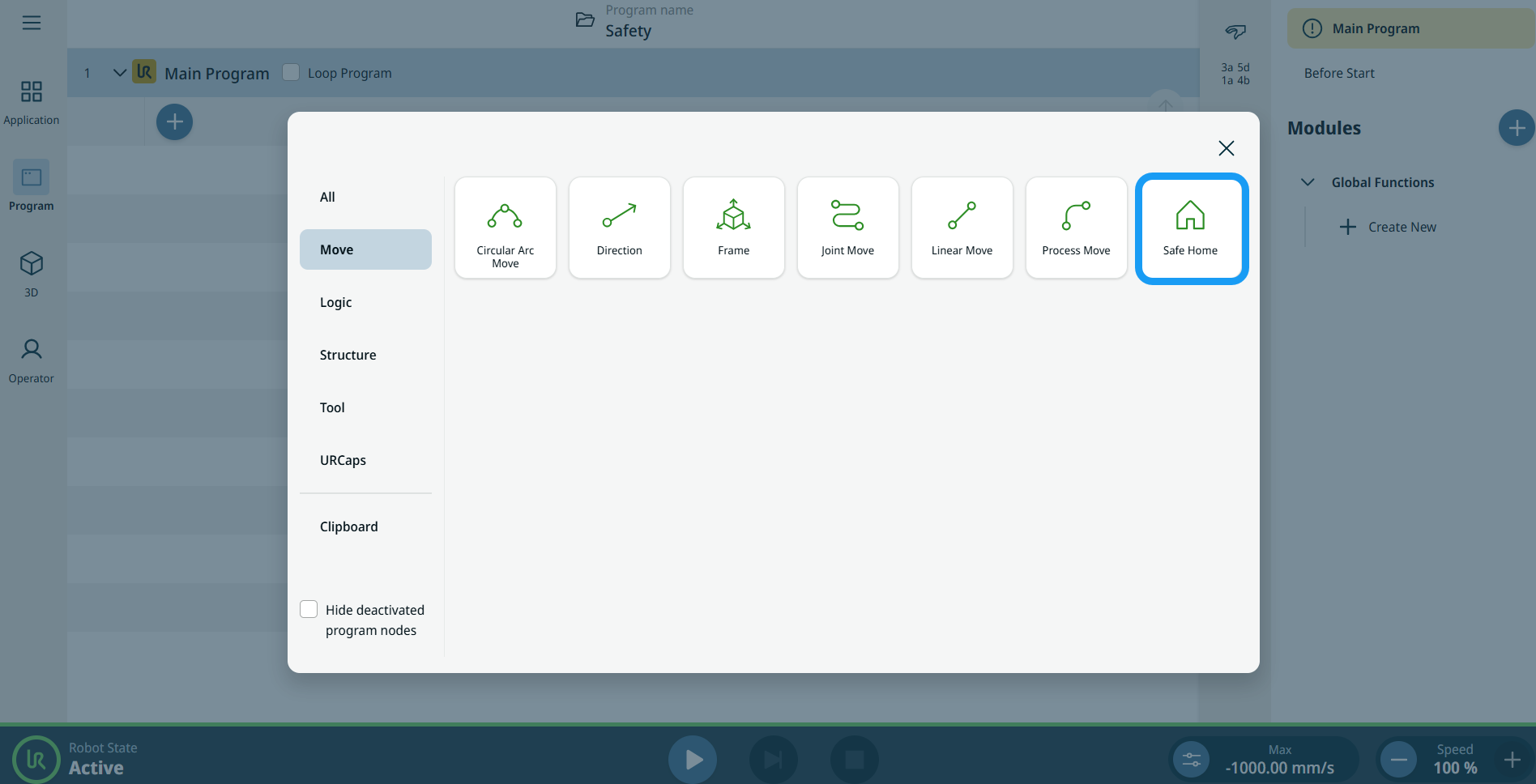
Posizione principale di sicurezza come nodo programma |
Il nodo programma Posizione principale di sicurezza si trova sotto la categoria nodi Muovi nella sezione nodi Comando. Questo nodo viene utilizzato per ordinare al robot di spostarsi nella sua posizione principale di sicurezza predefinita, configurato nelle impostazioni dell'applicazione di sicurezza per la posizione principale di sicurezza.
L'aggiunta del nodo senza una posizione principale di sicurezza configurata nella sezione sicurezza contrassegnerà il nodo con il colore giallo.

Il nodo di comando Posizione principale di sicurezza dispone di opzioni relative ai profili di movimento e altre impostazioni avanzate quando si tocca l'icona ellissi
|
 .
.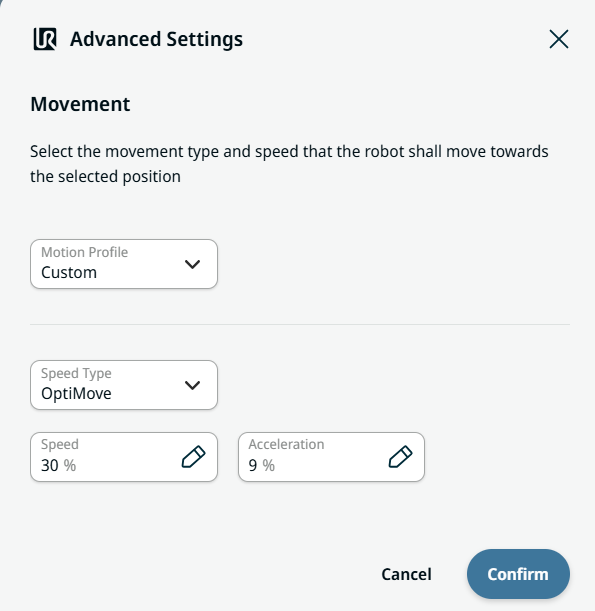
| Impostazioni avanzate |
Gli utenti possono creare profili di movimento nelle impostazioni avanzate utilizzando le due schede e i due campi:
Profilo di movimento è una funzione che consente agli utenti di impostare profili di movimento predefiniti nei nodi Muovi: Spostamento giunto, Spostamento lineare, Spostamento arco circolare, Spostamento processo e Direzione. Il profilo di movimento Personalizzato consente agli utenti di definire i dati di movimento nel nodo Muovi. Nel campo Tipo di velocità , OptiMove è l'opzione predefinita. Scegliere il movimento " " o " " se si desidera specificare velocità e accelerazione in gradi al secondo o in mm al secondo. Le impostazioni OptiMove sono specificate in percentuale per semplificare l'utilizzo e la configurazione. Gli utenti possono configurare la percentuale di velocità preferita nella scheda Velocità, la quale imposta la velocità di spostamento desiderata come percentuale della velocità massima raggiungibile dal robot. Gli utenti possono configurare la percentuale di accelerazione preferita nella scheda Accelerazione, la quale imposta i limiti di coppia desiderati durante l'accelerazione e la decelerazione come percentuale della potenza massima del robot.
|