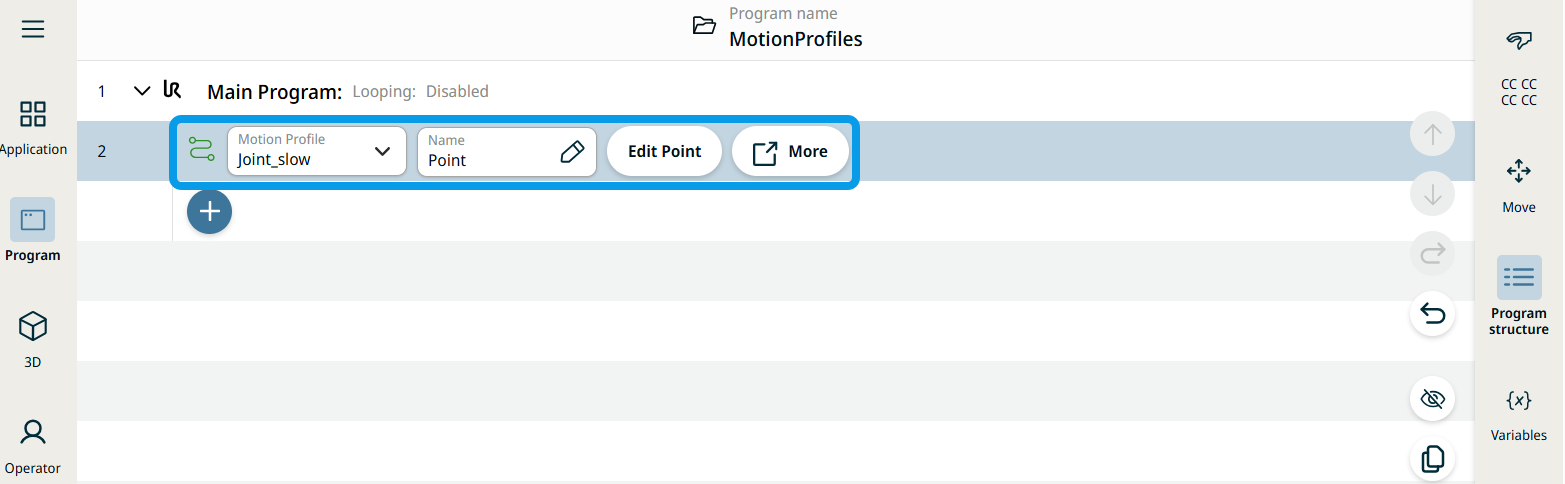
Joint Move
| Leírás |
The Joint Move works in a similar way to Move to command, but it supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. A mozgatás nem feltétlenül az A és B közötti egyenes vonal, hanem az ízületek kiindulási és véghelyzete szempontjából optimális útvonal. Joint Move makes movements that are calculated in the robot arm joint space. Az ízületeket úgy vezérli, hogy egyidejűleg fejezzék be mozgásukat. Ez a mozgatástípus a szerszám által követett ívelt pályát eredményez.
|
|
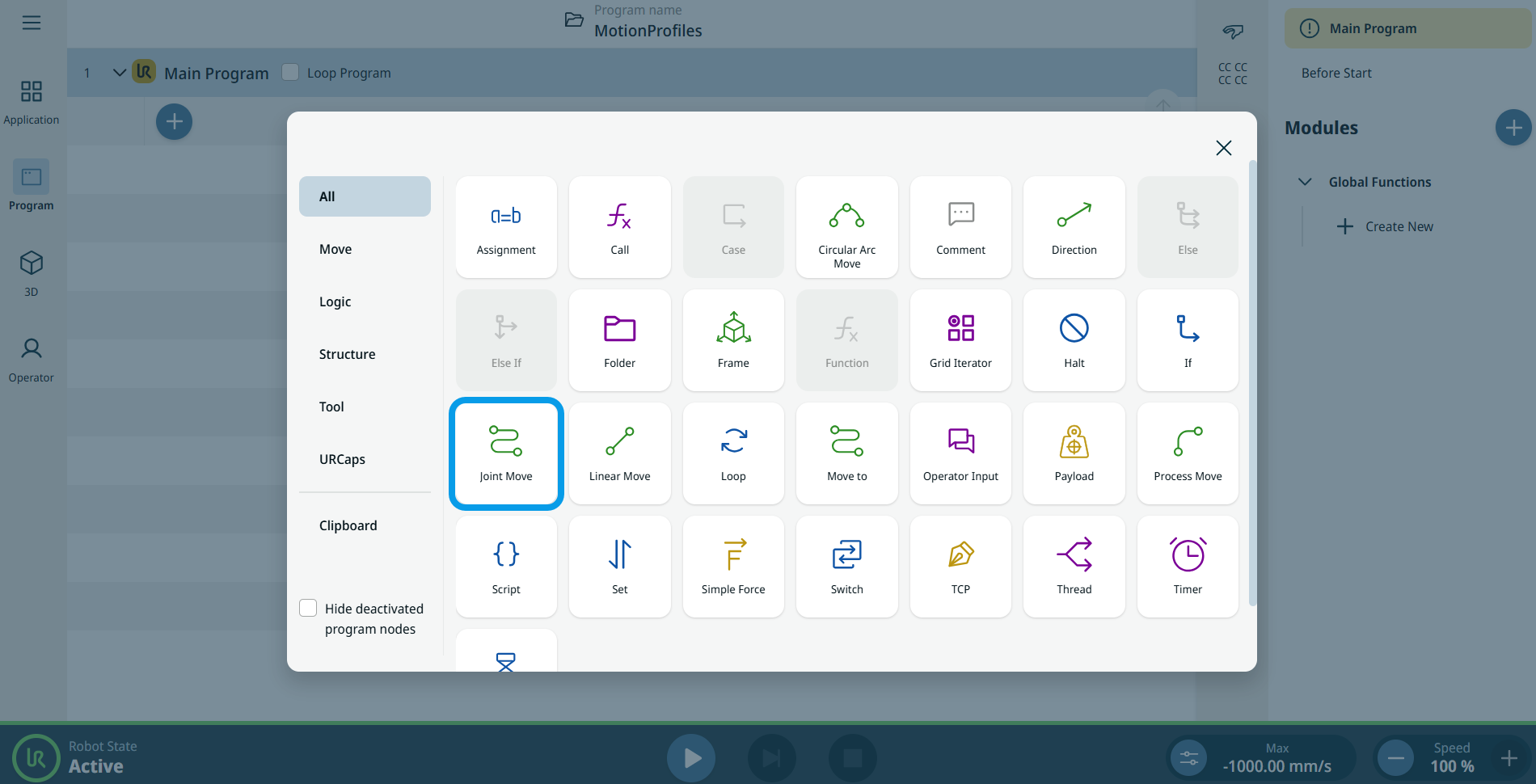
To access Joint Move command |
|
|
|
|
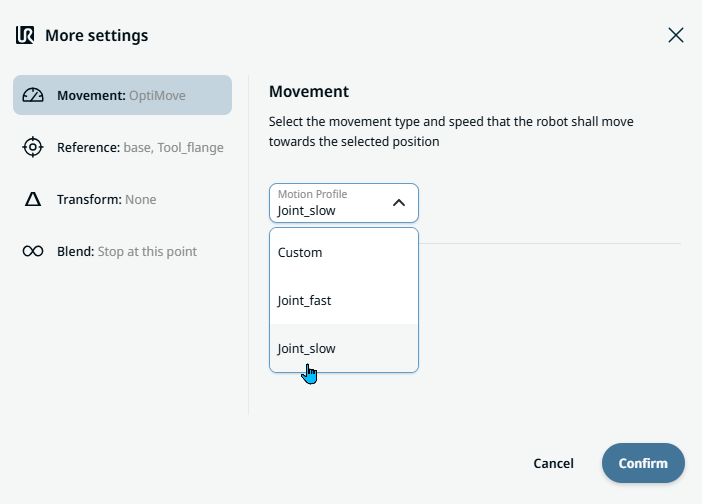
| Movement setting |
|
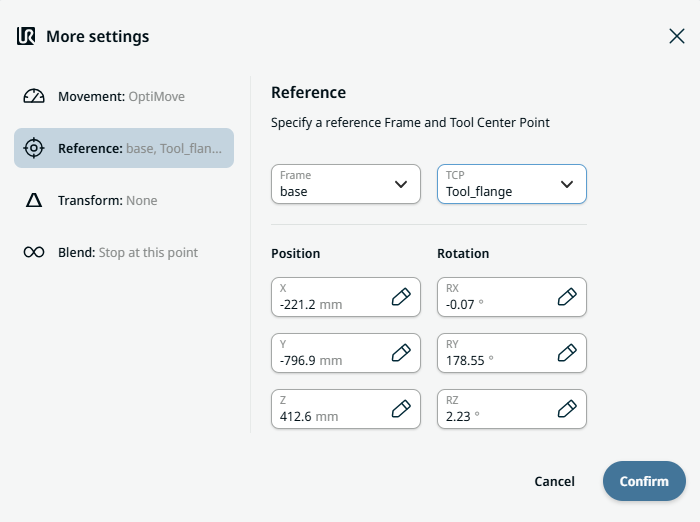
| Reference setting |
|
| Transform setting |
|
|
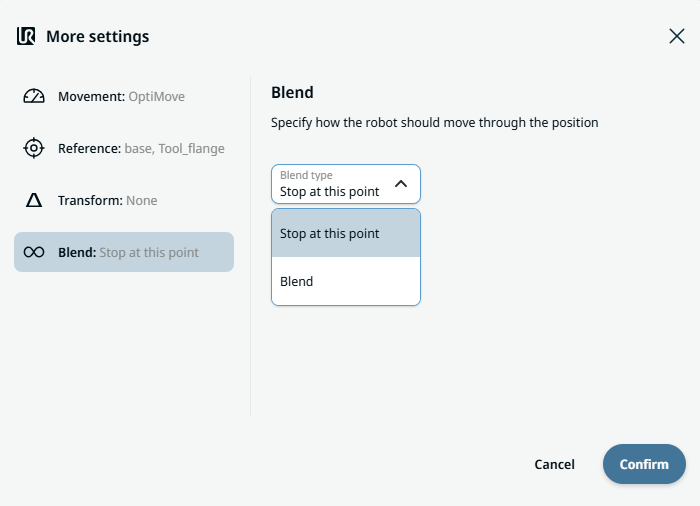
Blend setting |
|