Szingularitás
| Leírás |
A szingularitás olyan póz, amely korlátozza a robot mozgását és pozicionálási képességét. A robotkar megállhat, vagy nagyon hirtelen és gyors mozgást végezhet, amikor megközelít és elhagy egy szingularitást. A robot munkaterületen való elhelyezése és a működési tér meghatározása során fontos számításba venni az alábbiakban részletezett szingularitási pozíciót. Győződjön meg arról, hogy a robot mozgása a szingularitás közelében nem jelent veszélyt a robotkar, a végeffektor és a munkadarab hatókörén belül tartózkodó személyekre.
Az alábbiak szingularitást okoznak a robotkarban:
|
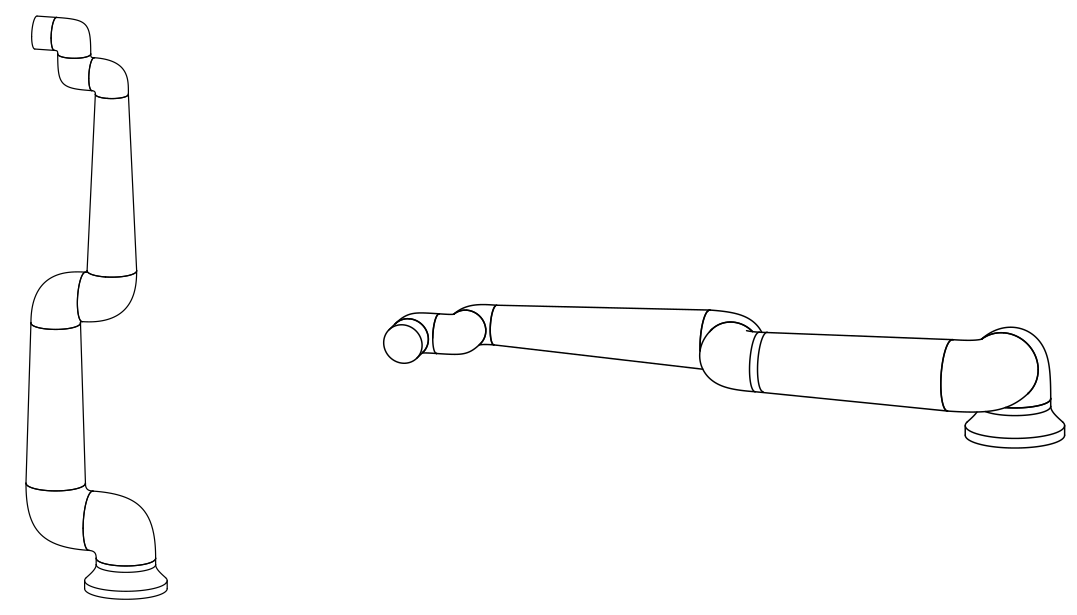
| Külső munkaterület határa
|
A szingularitás azért következik be, mert a robot nem nyúl elég messzire, vagy túlnyúl a maximális munkaterületen.
Elkerülendő: Rendezze el a robot körüli berendezéseket úgy, hogy a robot ne nyúljon túl az ajánlott munkaterületen.
|
| Belső munkaterület határa
|
A szingularitás azért következik be, mert a mozgások közvetlenül a robot alapja felett vagy közvetlenül alatta vannak. Emiatt több pozíció/orientáció elérhetetlenné válik.
Elkerülendő: Programozza a robot feladatát úgy, hogy ne kelljen a központi hengerben vagy annak közelében dolgoznia. Azt is megfontolhatja, hogy a robot alapját vízszintes felületre szereli, hogy a központi henger függőlegesből vízszintessé váljon, és így távolabb kerülhessen a feladat kritikus területeitől.
|
| Csukló beállítása
|
Ez a szingularitás azért következik be, mert a 2. csuklóízület ugyanabban a síkban forog, mint a váll, a könyök és az 1. csuklóízület. Ez a munkaterülettől függetlenül korlátozza a robotkar mozgástartományát.
Elkerülendő: Rendezze el a robotfeladatot úgy, hogy a robot csuklóízületeit ne kelljen ilyen módon beállítani. A szerszám irányát is eltolhatja, így a szerszám a problémás csuklómódosítás nélkül is irányulhat vízszintesen.
|