Maximális hasznos teher
| Leírás |
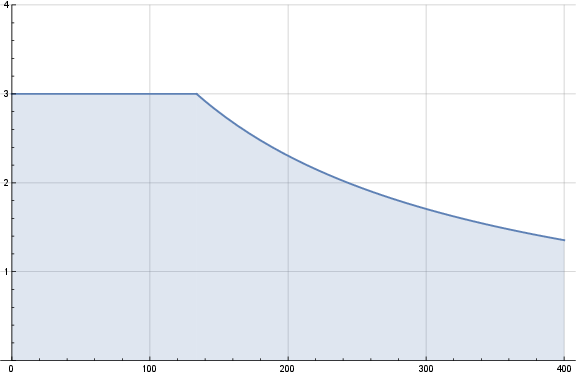
A robotkar névleges hasznos teherbírása a hasznos teher súlypontja (CoG) eltolódásától függ, ahogy az alábbiakban látható. A CoG eltolás a meghatározás szerint a szerszámkarima középpontja és a csatlakoztatott hasznos teher súlypontja közti távolság.
A robotkar hosszú súlyponteltolódást is elbír, ha a hasznos teher a szerszámkarima alatt helyezkedik el. Például a hasznos teher tömegének kiszámításakor egy „felvétel és elhelyezés” típusú alkalmazásban mind a megfogót, mind a munkadarabot figyelembe kell venni.
A robot gyorsulási képessége csökkenhet, ha a hasznos teher súlypontja kilép a robot hatótávolságából és hasznos terheléséből. A robot hatótávolságát és hasznos terhelését a Műszaki adatokban ellenőrizheti.
|
|
|
|
| A hasznos teher tehetetlensége |
Ha a hasznos terhelés helyesen van beállítva, akkor nagy tehetetlenségű hasznos terheléseket is konfigurálhat. A vezérlőszoftver automatikusan beállítja a gyorsulásokat, ha a következő paraméterek helyesen vannak beállítva:
Az URSim segítségével kiértékelheti a robotmozgások gyorsulásait és ciklusidejét egy adott hasznos teherrel.
|