Charge utile
| Description |
Vous devez définir la charge utile, le CdG et l'inertie pour que le robot fonctionne de façon optimale. Vous pouvez définir plusieurs charges utiles, et passer de l'une à l'autre dans votre programme. Ceci est utile dans les applications de Sélection et placement où le robot ramasse et relâche un objet, par exemple.
|

| Ajout, renommage, modification et suppression de charges utiles |
Vous pouvez commencer à configurer une nouvelle charge utile avec les actions suivantes :
|
 pour définir une nouvelle charge utile avec un nom unique. La nouvelle charge utile est disponible dans le menu déroulant.
pour définir une nouvelle charge utile avec un nom unique. La nouvelle charge utile est disponible dans le menu déroulant. pour renommer une charge utile.
pour renommer une charge utile. pour supprimer une charge utile sélectionnée. Vous ne pouvez pas supprimer la dernière charge utile.
pour supprimer une charge utile sélectionnée. Vous ne pouvez pas supprimer la dernière charge utile.| Charge active |
La coche dans le menu déroulant indique la charge utile active |
 .
La charge utile active peut être changée avec la commande
.
La charge utile active peut être changée avec la commande  .
.
| Charge utile par défaut |
La charge utile par défaut est configurée comme la charge utile active avant le démarrage du programme.
L’icône verte dans le menu déroulant indique la charge utile configurée par défaut
|
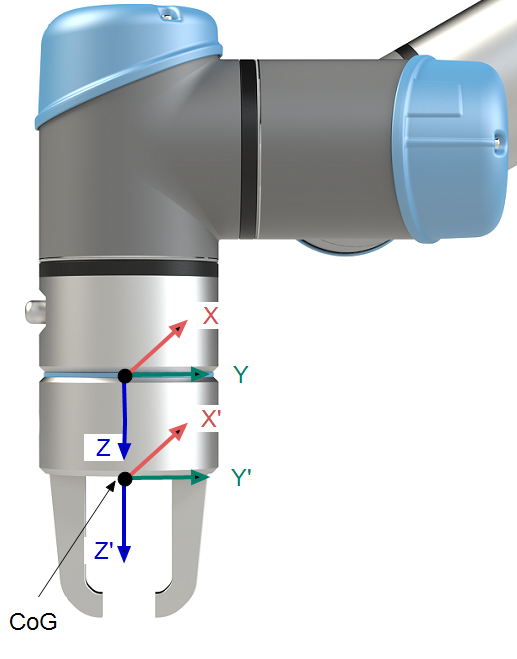
| Configurer le Centre de gravité |
Appuyez sur les champs |
| Payload Estimation |
Cette fonction permet au robot d’aider à définir la Charge utile correcte et le Centre de gravité (CdG).
|