Dimensionnement du support
| Description |
La structure (socle) sur laquelle le bras du robot est monté est une partie cruciale de l'installation du robot. Le support doit être robuste et exempt de toute vibration provenant de sources externes.
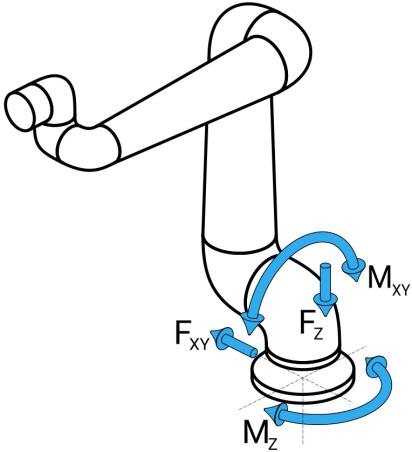
Chaque articulation du robot produit un couple qui déplace et arrête le bras du robot. Pendant le fonctionnement normal ininterrompu et pendant le mouvement d'arrêt, les couples des articulations sont transférés au support du robot en tant que :
Force et couple au niveau de la définition de la bride de base. |
|
Dimensionnement du support |
L'ampleur des charges dépend du modèle de robot, du programme et de plusieurs autres facteurs. Le dimensionnement du support doit tenir compte des charges que le bras du robot génère pendant le fonctionnement normal ininterrompu et pendant le mouvement d'arrêt de catégorie 0, 1 et 2.
Pendant le mouvement d'arrêt, les articulations sont autorisées à dépasser le couple de fonctionnement nominal maximal. La charge pendant le mouvement d'arrêt est indépendante du type de catégorie d'arrêt. Les valeurs indiquées dans les tableaux suivants sont les charges nominales maximales dans les mouvements les plus défavorables multipliées par un facteur de sécurité de 2,5. Les charges réelles ne dépasseront pas ces valeurs.
Couple maximal des articulations pendant les arrêts de catégorie 0, 1 et 2.
Couple maximal des articulations en fonctionnement normal.
Les charges normales de fonctionnement peuvent généralement être réduites en abaissant les limites d'accélération des articulations. Les charges de fonctionnement réelles dépendent de l'application et du programme du robot. Vous pouvez utiliser URSim pour évaluer les charges attendues dans votre application spécifique. |
Marges de sécurité |
Vous avez la possibilité d'intégrer des marges de sécurité supplémentaires en tenant compte des considérations de conception suivantes :
|