Pour accéder à OptiMove
-
Go to the main program screen. Voir
-
Appuyez sur l'icône Joint Move ou Linear Move dans la boîte à outils Commandes.

A node is inserted into the program tree. Le nœud comporte deux champs modifiables et des onglets, ainsi qu'une icône représentant des points de suspension
 .
.
-
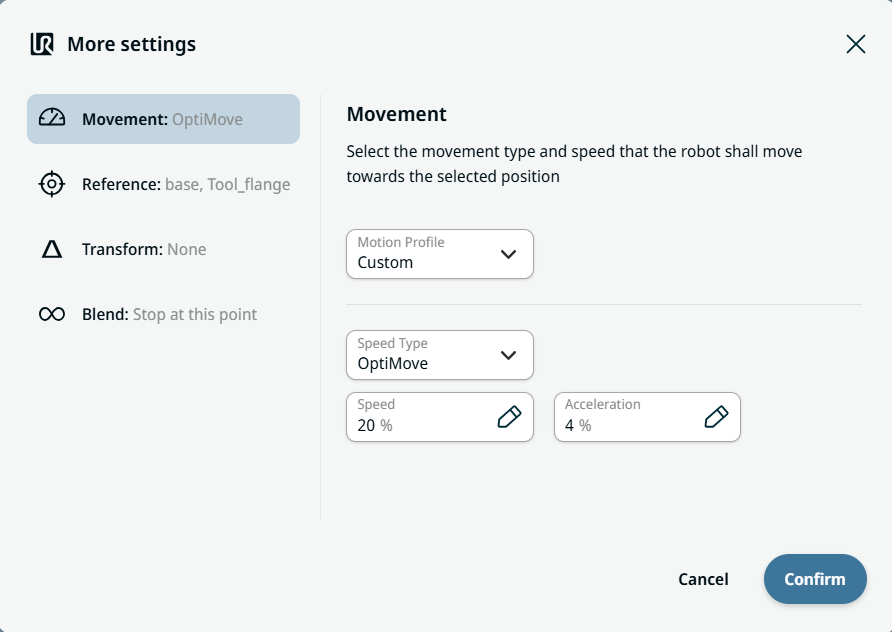
Tap the ellipsis icon and the More settings screen appears.

-
Appuyez sur Mouvement sur le côté gauche de l'écran.
Sur la droite, deux onglets et des champs apparaissent :
-
Profil de déplacement
-
Type de vitesse
-
Onglet Vitesse
-
Onglet « Accélération »
-
-
In the Motion Value field, OptiMove is the default option. Choisissez le mouvement « Classic » si vous souhaitez saisir la vitesse et l'accélération en degrés par seconde ou en mm par seconde.
-
Cliquez sur OptiMove.
Les paramètres d' d'OptiMove sont exprimés en pourcentage afin de simplifier l'utilisation et la configuration.
-
Dans l'onglet « Speed » ( de vitesse), saisissez le pourcentage de la vitesse souhaitée, puis appuyez sur « » (Confirmer) et « » (Confirmer).
L'onglet « Vitesse » permet de définir la vitesse de déplacement cible en pourcentage de la vitesse maximale du robot.
-
Dans l'onglet « Acceleration» (Accélération) , saisissez le pourcentage d'accélération souhaité et appuyez sur « » (Confirmer).
L'onglet « Accélération » permet de définir les limites de couple cibles pendant l'accélération et la décélération, exprimées en pourcentage de la puissance maximale du robot.