Premier démarrage
| Description |
Le premier démarrage est la séquence initiale d'actions que vous pouvez effectuer avec le robot après l'assemblage. Cette séquence initiale vous demande :
|
|
Le fait de ne pas vérifier la charge utile et l'installation avant de démarrer le bras du robot peut entraîner des blessures au personnel et/ou des dommages matériels.
Des réglages incorrects de la charge utile et de l'installation empêchent le bras du robot et le boîtier de commande de fonctionner correctement.
Le démarrage du robot à des températures plus basses peut entraîner des performances plus faibles ou des arrêts, car la viscosité de l'huile et de la graisse dépendent de la température.
|
Mise sous tension du robot
| Pour allumer le robot |
La mise sous tension du robot allume le boîtier de commande et charge l'affichage sur l'écran du TP.
|
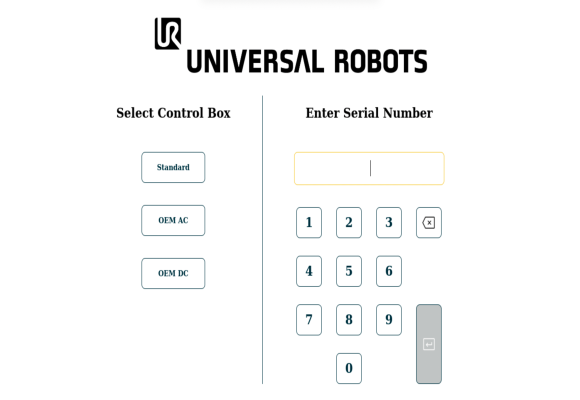
Insertion du numéro de série
| Pour insérer le numéro de série |
L'installation de votre robot pour la première fois nécessite de saisir le numéro de série du boîtier de commande sur le bras du robot. Cette procédure est également requise lorsque vous réinstallez le logiciel. Par exemple lorsque vous installez une mise à jour logicielle. |
|
|
Le chargement de l'écran de démarrage peut prendre quelques minutes.
|
Démarrer le bras du robot
| Pour démarrer le robot |
Le démarrage du bras du robot désengage le système de freinage, ce qui vous permet de commencer à déplacer le bras du robot et de commencer à utiliser PolyScope X.
|


Lorsque l'état du bras du robot passe d'Inactif à Normal, les données des capteurs sont vérifiées par rapport au montage configuré du bras du robot. Si le montage est vérifié, appuyez sur DÉMARRER pour continuer à desserrer tous les freins des articulations préparant ainsi le bras du robot pour le fonctionnement.
|

Mise hors tension du robot
| Pour éteindre le bras robot |
Un démarrage et/ou un mouvement inattendu peut entraîner des blessures.
Vous pouvez désormais :
|