Limite de couple de serrage du poignet
| Description |
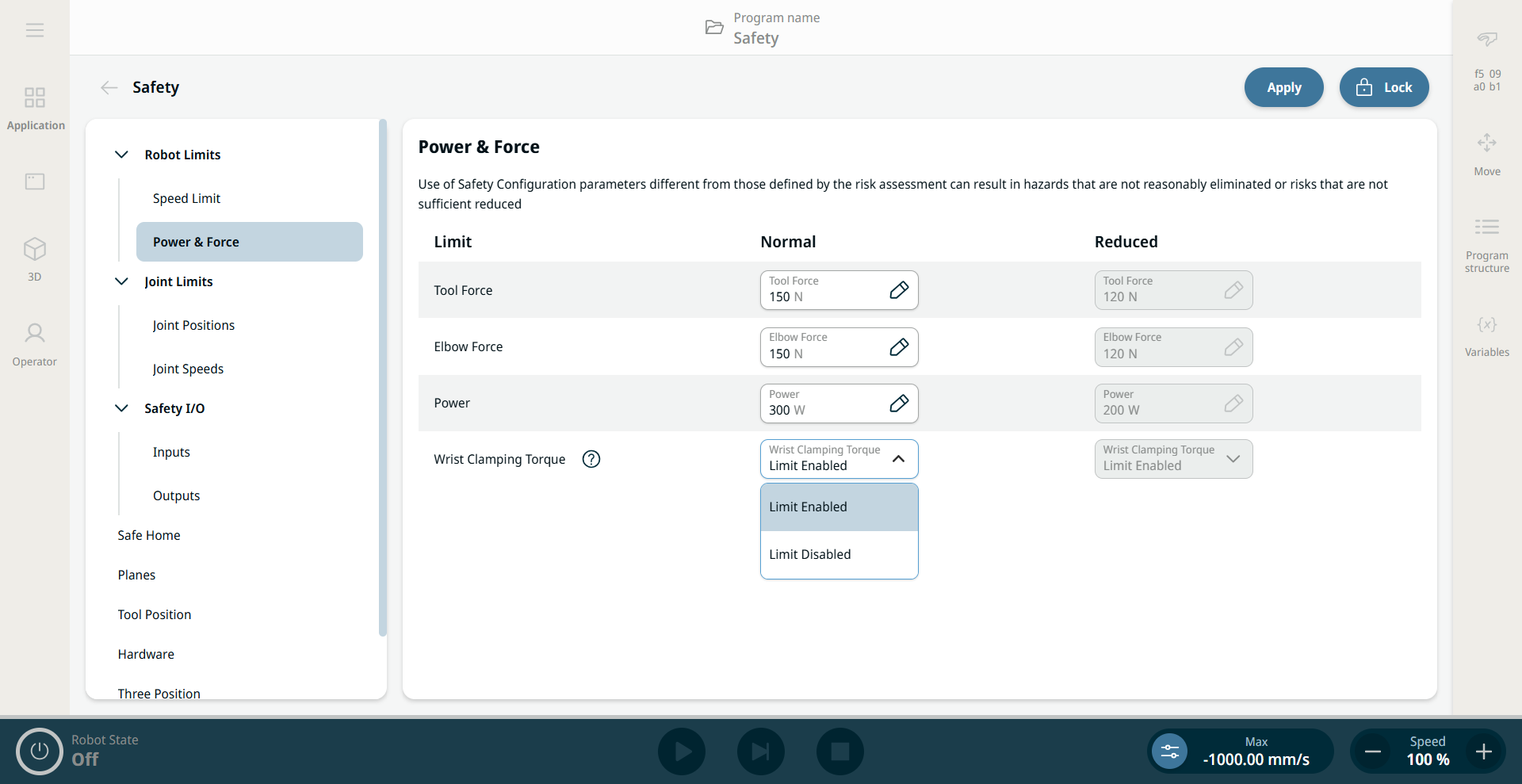
Limite de couple de serrage du poignet est un réglage qui permet ou désactive la limitation du couple de serrage maximum pour les articulations du poignet du robot. La limitation est activée par défaut. Cette fonction de sécurité limite le couple que le poignet peut appliquer lors de la poussée.
|
|
Détails de la limite de couple de serrage du poignet |
Lorsqu'elle est activée, le robot limite le couple dans les articulations du poignet pour éviter le serrage entre le poignet, la charge utile et le bras inférieur du robot. Lorsque le réglage est activé, il définit également une limite supérieure non sécurisée pour les fenêtres de couple appliquées des articulations de base, d'épaule et de coude. Dans les applications de contrôle de force, les forces de contact réalisables peuvent être nettement inférieures aux forces spécifiées dans les fonctions de sécurité Limite de force de l'outil et Limite de force du coude.
Lorsqu'elle est désactivée, le robot peut utiliser une force de poussage plus élevée avec les articulations du poignet par exemple dans les applications contrôlées par force. Lorsque la fonction est désactivée, les risques de serrage entre le poignet, la charge utile et le bras inférieur du robot doivent être atténués par d'autres moyens. Cette fonction de sécurité est activée par défaut sur tous les robots. Dans PolyScope X version 10.12 et plus récente, il est possible de désactiver cette fonction de sécurité.
|
|
Activer et désactiver la Limte de couple de serrage du poignet |
|