Joint Move
| Description |
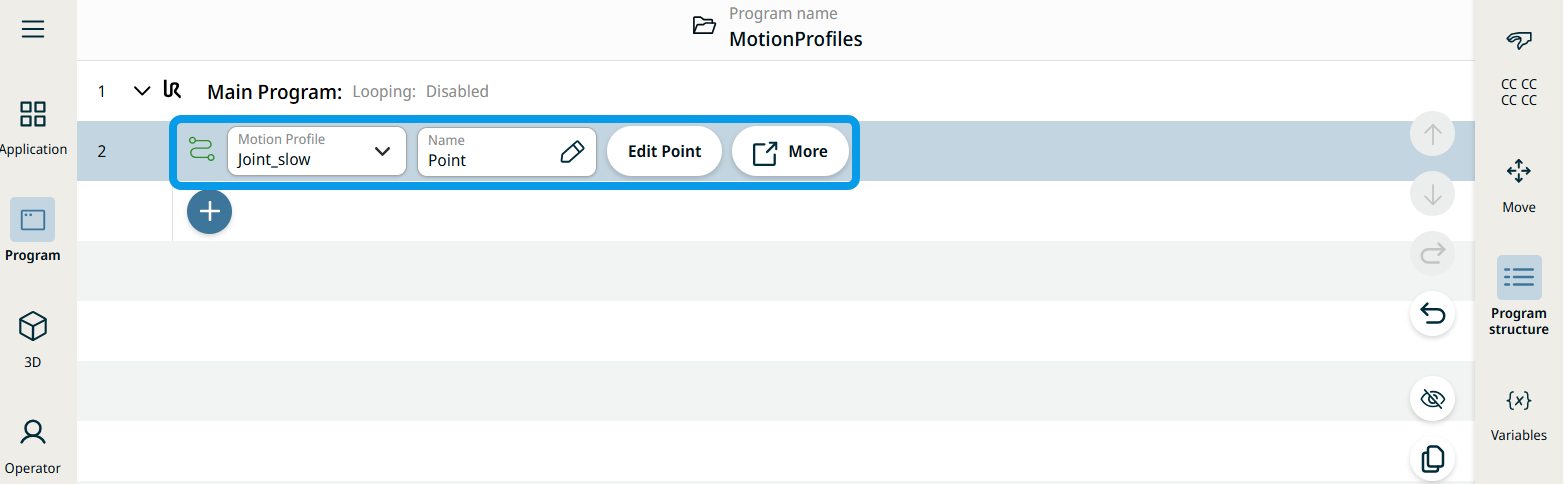
The Joint Move works in a similar way to Move to command, but it supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. Le mouvement peut ne pas être une ligne directe entre A et B, mais être optimal pour la position de départ et la position finale des articulations. Joint Move makes movements that are calculated in the robot arm joint space. Les articulations sont commandées pour achever leurs déplacements en même temps. Ce type de déplacement a pour résultat que l'outil suit une trajectoire courbe.
|
|
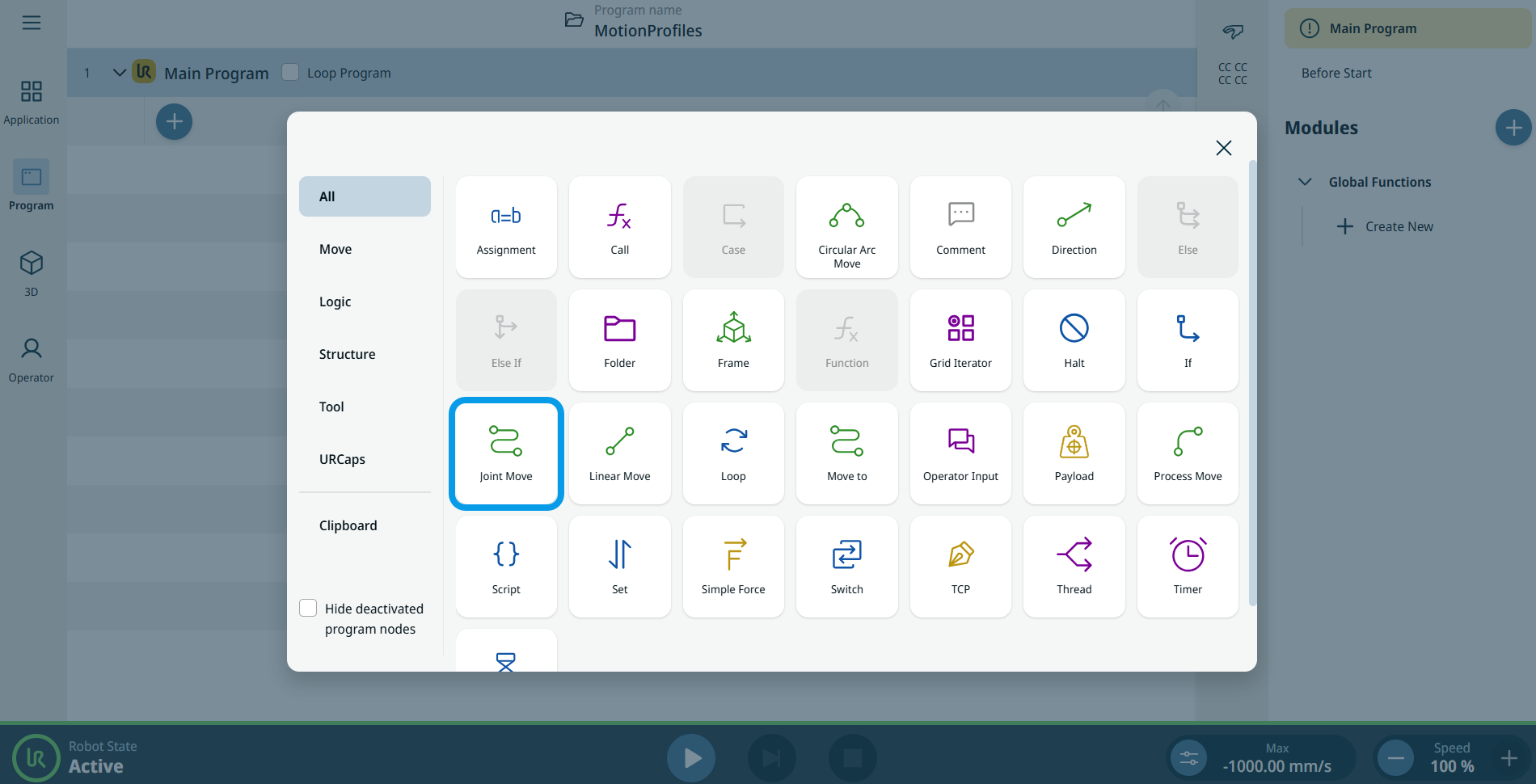
To access Joint Move command |
|
|
|
|
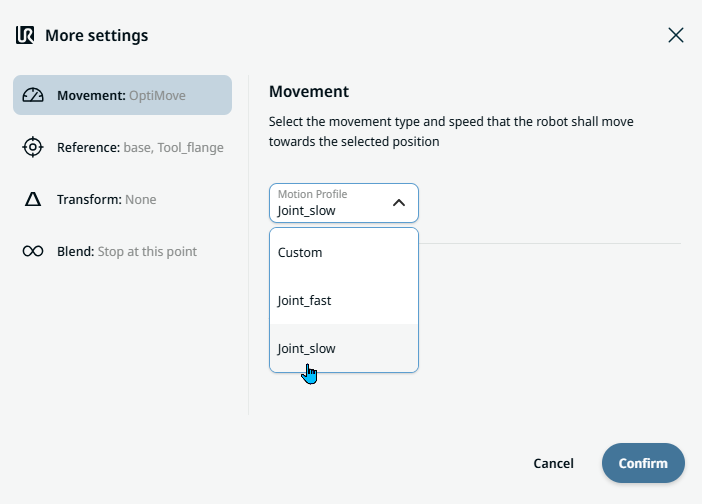
| Movement setting |
|
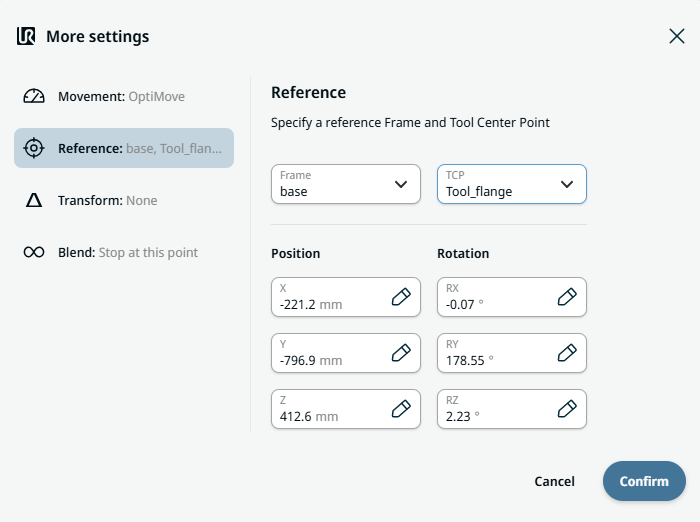
| Reference setting |
|
| Transform setting |
|
|
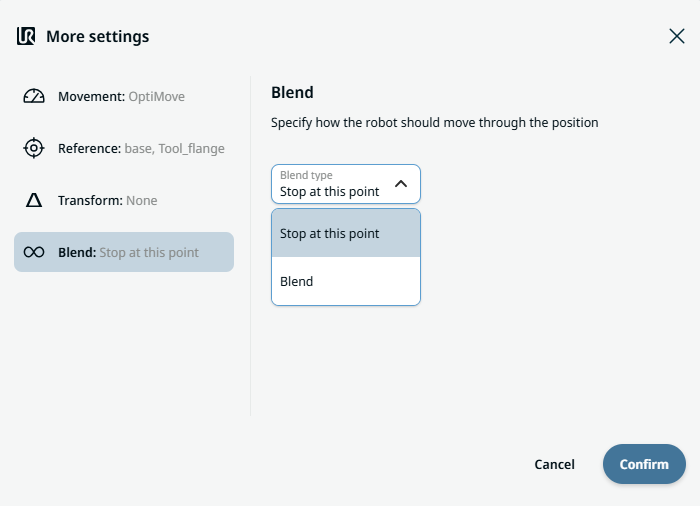
Blend setting |
|