Position de l'outil
| Détails |
La position de l'outil présente deux avantages clés :
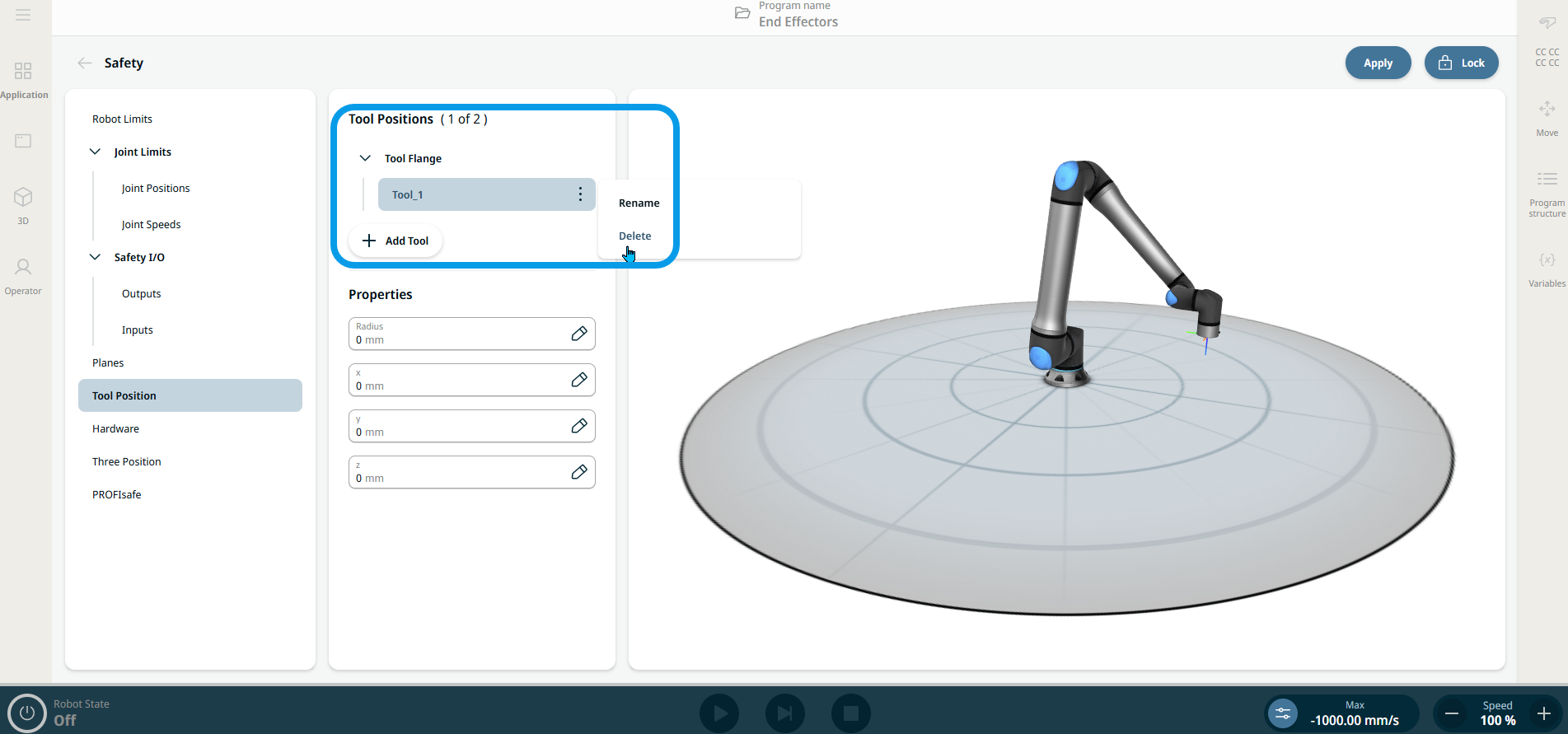
Vous pouvez définir, configurer et gérer jusqu'à deux positions de l'outil.
|
| Outils définis par l'utilisateur |
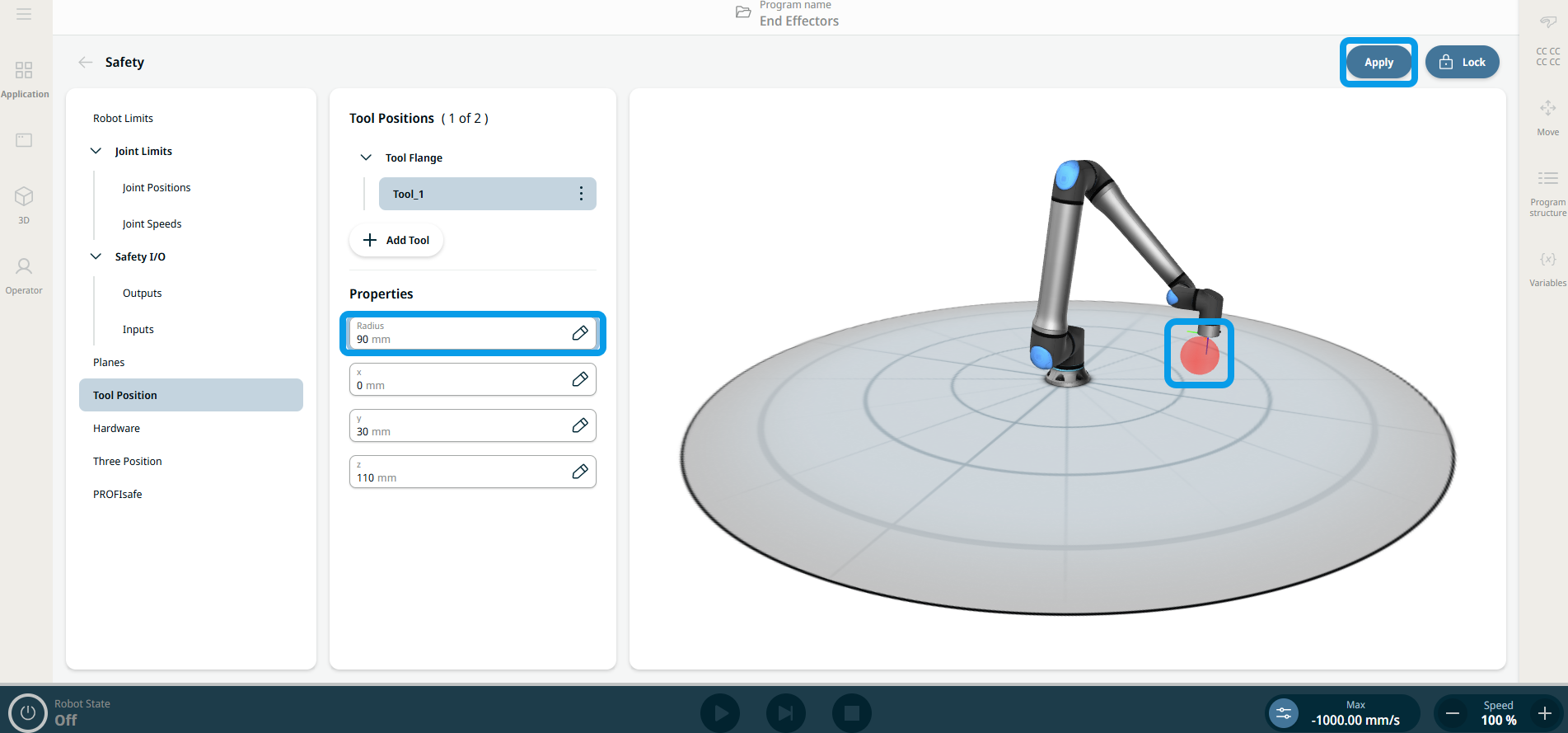
Pour les outils définis par l'utilisateur, l'utilisateur peut modifier :
|
|
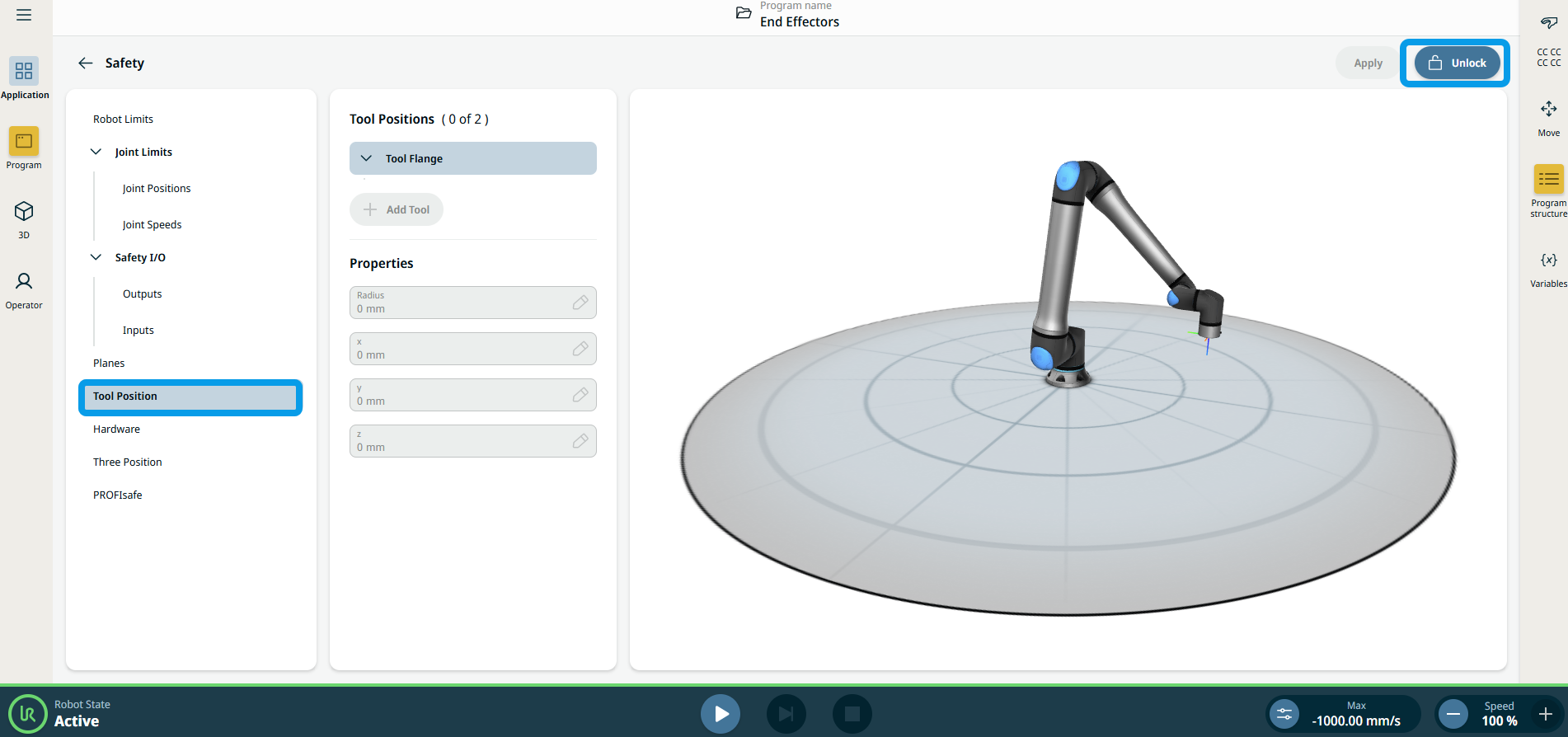
Pour accéder à la position de l'outil |
|
|
|
|
|
|
|