Movimiento
| Descripción |
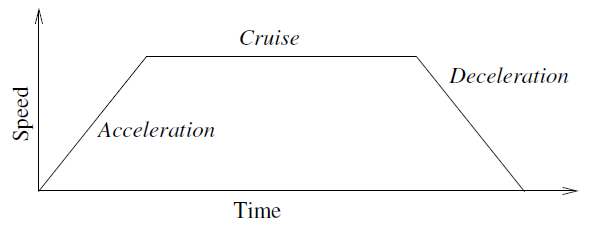
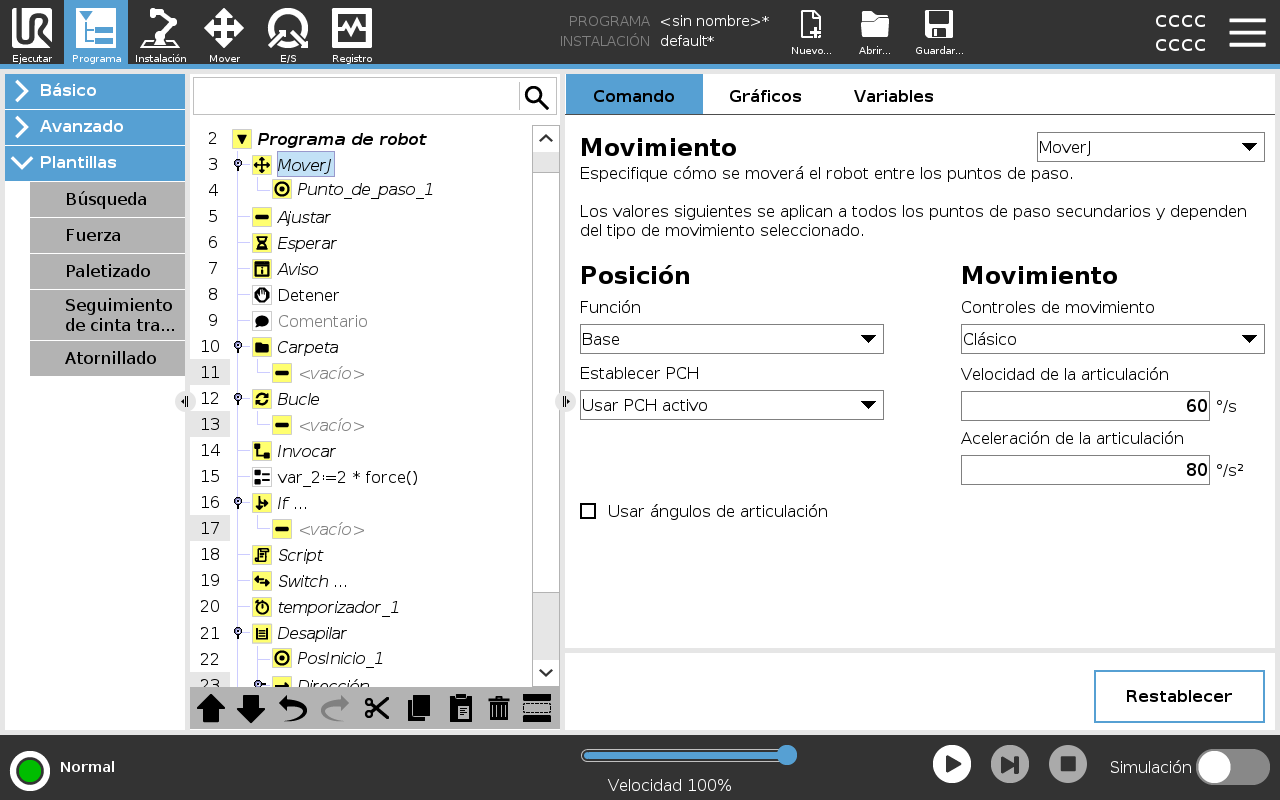
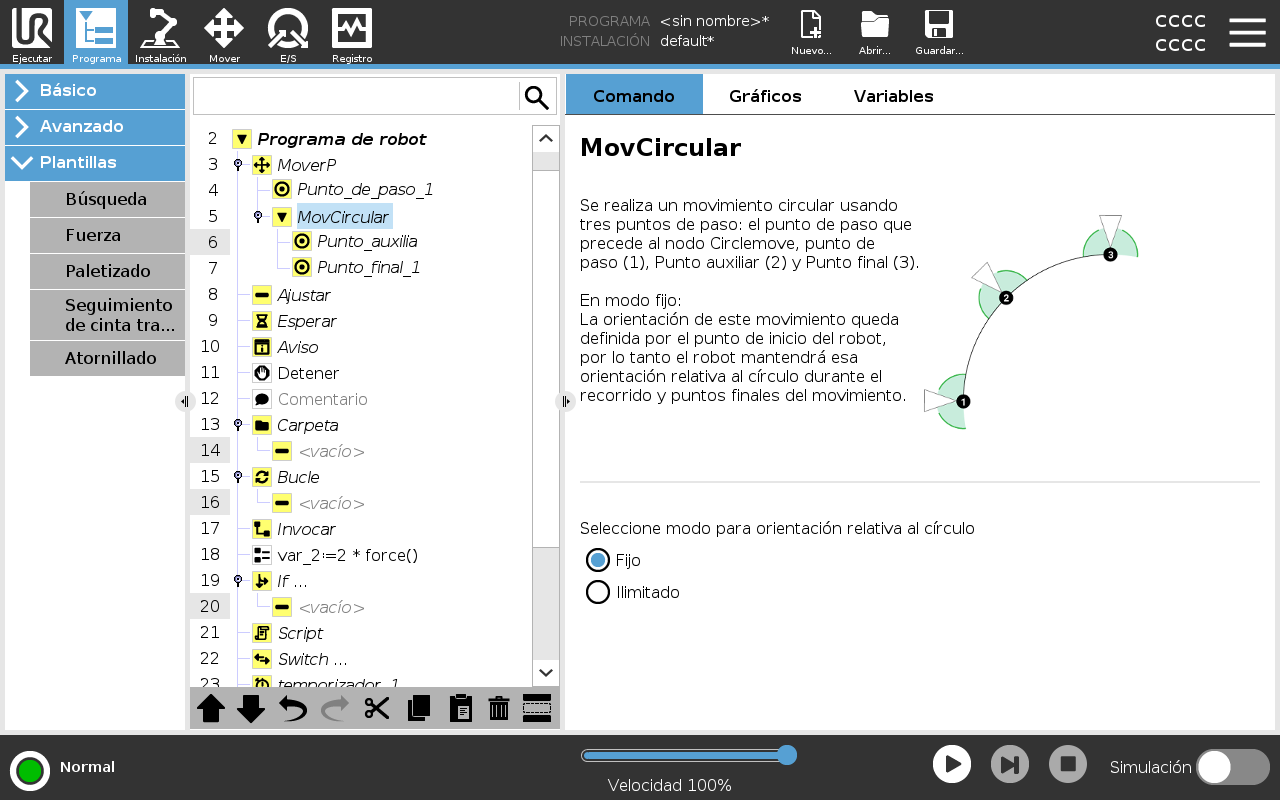
El comando Mover permite que el robot se mueva del punto A al punto B. La forma en que se mueve el robot es importante para la tarea que está realizando. Cuando añade un comando Mover a su árbol de programa, el panel Mover aparece a la derecha de la pantalla. Las opciones en el panel Mover le permiten configurar un comando Mover y sus puntos de paso asociados.
|
|
La opción Usar ángulos de articulación es una alternativa a la pose 3D cuando usa MoverJ para definir un punto de paso.
Los puntos de paso definidos con Usar ángulos de articulación no se cambian cuando el programa pasa de un robot a otro. Esto resulta útil si está instalando su programa en un nuevo robot.
Utilizar la opción Usar ángulos de articulación hará que la función y las opciones de PCH no estén disponibles. |
|
Utilice este ajuste si necesita cambiar el PCH durante la ejecución del programa de robot. Esto resulta útil si necesita manipular objetos diferentes en el programa de robot. La forma de moverse del robot se ajusta dependiendo de qué PCH se configura como un PCH activo. Ignorar TCP activo permite ajustar este movimiento en relación con la brida de la herramienta. |
|
| Para ajustar el PCH en un movimiento |
|
|
Puede usar una Función entre puntos de paso para que el programa recuerde las coordenadas de la herramienta. Esto es útil al configurar los puntos de paso (consulte Funciones).
Puede utilizar la Función en las circunstancias siguientes:
|