Singularidad
| Descripción |
Una singularidad es una pose que restringe el movimiento y la capacidad de posicionar el robot. El brazo robótico puede dejar de moverse o tener movimientos muy bruscos y rápidos si se acerca a una singularidad o la abandona. Durante la colocación del robot en el espacio de trabajo y la definición del espacio operativo, es importante tener en cuenta la posición de singularidad que se detalla a continuación. Asegúrese de que el movimiento del robot cerca de una singularidad no suponga un peligro para nadie dentro del alcance del brazo robótico, del efector final y de la pieza.
Lo siguiente causa singularidad en el brazo robótico:
|
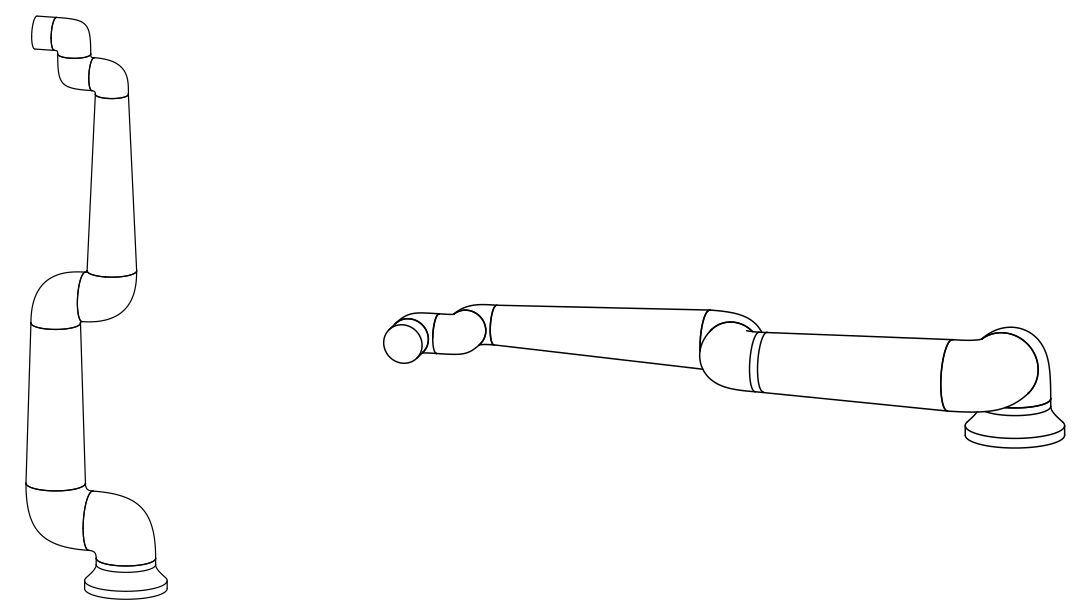
| Límite del espacio de trabajo exterior
|
La singularidad ocurre porque el robot no puede llegar lo suficientemente lejos o llega fuera del área máxima de trabajo.
Para evitarlo: disponga el equipo alrededor del robot para evitar que salga del espacio de trabajo recomendado.
|
| Límite del espacio de trabajo interior
|
La singularidad se produce porque los movimientos están directamente por encima o por debajo de la base del robot. Esto hace que muchas posiciones/orientaciones sean inalcanzables.
Para evitarlo: programe la tarea del robot de tal manera que no sea necesario trabajar en el cilindro central o cerca de él. También puede considerar montar la base del robot en una superficie horizontal para girar el cilindro central de una orientación vertical a horizontal, lo que podría alejarlo de las áreas críticas de la tarea.
|
| Alineación de la muñeca
|
Esta singularidad se produce porque la articulación 2 de muñeca gira en el mismo plano que la articulación 1 de muñeca, hombro y codo. Esto limita el rango de movimiento del brazo robótico, independientemente del espacio de trabajo.
Para evitarlo: diseñe la tarea del robot de tal manera que no sea necesario alinear las articulaciones de la muñeca del robot de esta manera. También puede desplazar la dirección de la herramienta, de modo que la herramienta pueda apuntar horizontalmente sin la alineación problemática de la muñeca.
|