Para acceder a OptiMove
-
Go to the main program screen. Consulte
-
Pulsa el icono Movimiento articular o Movimiento lineal en la caja de herramientas Comandos.

A node is inserted into the program tree. El nodo tiene dos campos y pestañas editables, y un icono de puntos suspensivos
 .
.
-
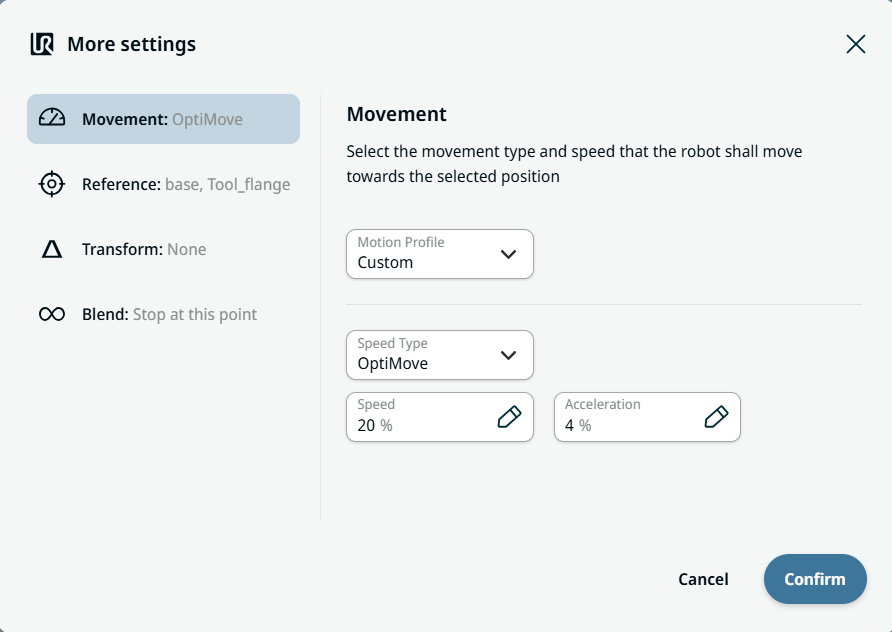
Toca el icono de los tres puntos y aparecerá la pantalla « » (Más ajustes).

-
Pulsa Movimiento en la parte izquierda de la pantalla.
En la parte derecha aparecen dos pestañas y campos:
-
Perfil de movimiento
-
Tipo de velocidad
-
Pestaña «Velocidad»
-
Pestaña «Aceleración»
-
-
In the Motion Value field, OptiMove is the default option. Seleccione el movimiento « » o « » si desea introducir la velocidad y la aceleración en grados por segundo o en milímetros por segundo.
-
Visite OptiMove.
e OptiMove: los ajustes se especifican en porcentaje para simplificar el uso y la configuración.
-
En la pestaña « » (Velocidad) , introduce el porcentaje de la velocidad que prefieras y pulsa « » (Confirmar).
La pestaña «Velocidad» permite establecer la velocidad de desplazamiento objetivo como un porcentaje de la velocidad máxima del robot.
-
En la pestaña « » (Aceleración) , introduce el porcentaje de aceleración que prefieras y pulsa « » (Confirmar).
La pestaña «Aceleración» establece los límites del par de torsión durante la aceleración y la desaceleración como porcentaje de la potencia máxima del robot.