Primer arranque
| Descripción |
El primer arranque es la secuencia inicial de acciones que puede realizar con el robot después del montaje. Esta secuencia inicial requiere que:
|
|
En caso de no verificar la carga útil y la instalación antes de poner en marcha el brazo robótico, podrían producirse lesiones personales o daños materiales.
Si se usan ajustes incorrectos de carga útil e instalación, el brazo robótico y la caja de control no funcionarán correctamente.
Si se pone en marcha el robot con temperaturas inferiores, podría reducirse el rendimiento o podrían producirse paradas debido a la viscosidad del lubricante y del aceite que dependen de la temperatura.
|
Encendido del robot
| Para encender el robot |
Encender el robot activa la caja de control y carga el display en la pantalla de la CP.
|
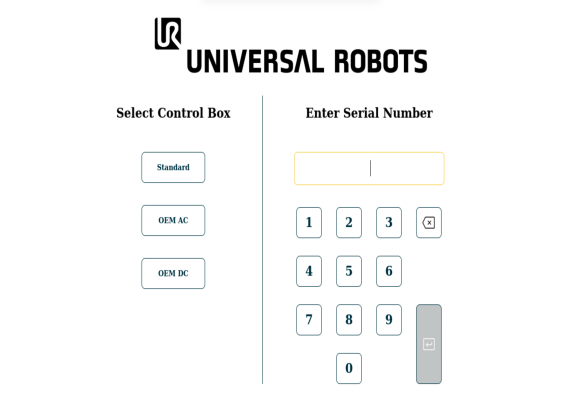
Inserción del número de serie
| Para insertar el número de serie |
Al instalar su robot por primera vez deberá introducir el número de serie en el brazo robótico. Este procedimiento también se requiere al reinstalar el software. Por ejemplo, cuando instale una actualización de software. |
|
|
La pantalla de inicio puede tardar unos minutos en cargarse.
|
Puesta en marcha del brazo robótico
| Para iniciar el robot |
Iniciar el brazo robótico desactiva el sistema de frenado, lo que le permite comenzar a mover el brazo robótico y empezar a usar PolyScope X.
|


Cuando el estado del brazo robótico cambie de Inactivo a Normal, los datos del sensor se compararán con el montaje configurado del brazo robótico. Si se verifica el montaje, pulse INICIAR para continuar liberando todos los frenos de articulación, y preparar el brazo robótico para su funcionamiento.
|

Apagado del robot
| Para apagar el brazo robótico |
Un arranque o movimiento inesperado puede provocar lesiones.
Ahora puedes:
|