Joint Move
| Descripción |
The Joint Move works in a similar way to Move to command, but it supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. El movimiento podría no ser una línea directa entre A y B, sino óptimo para la posición inicial y la posición final de las articulaciones. Joint Move makes movements that are calculated in the robot arm joint space. Las articulaciones se controlan para finalizar sus movimientos al mismo tiempo. Este tipo de movimiento da lugar a una trayectoria curva que debe seguir la herramienta.
|
|
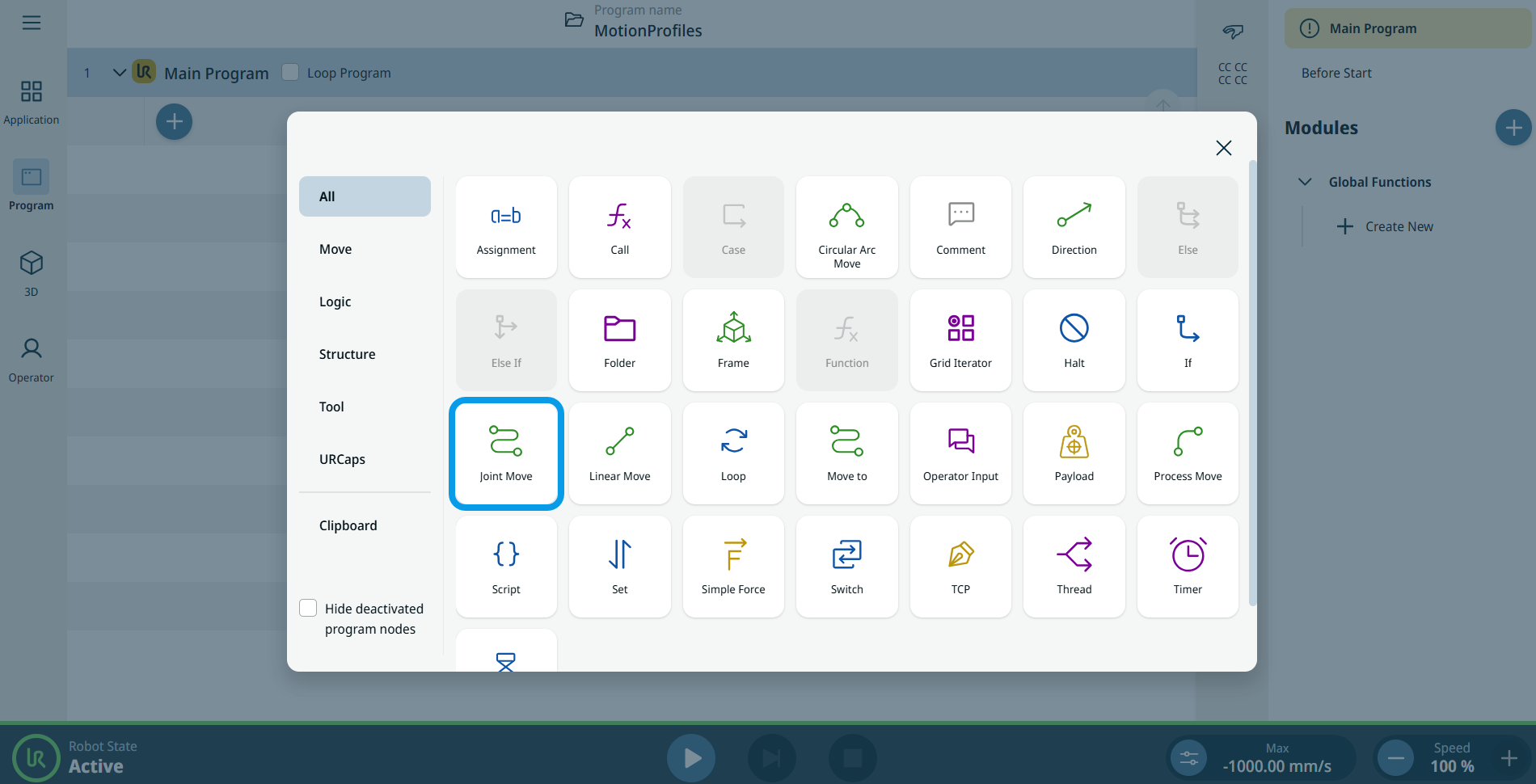
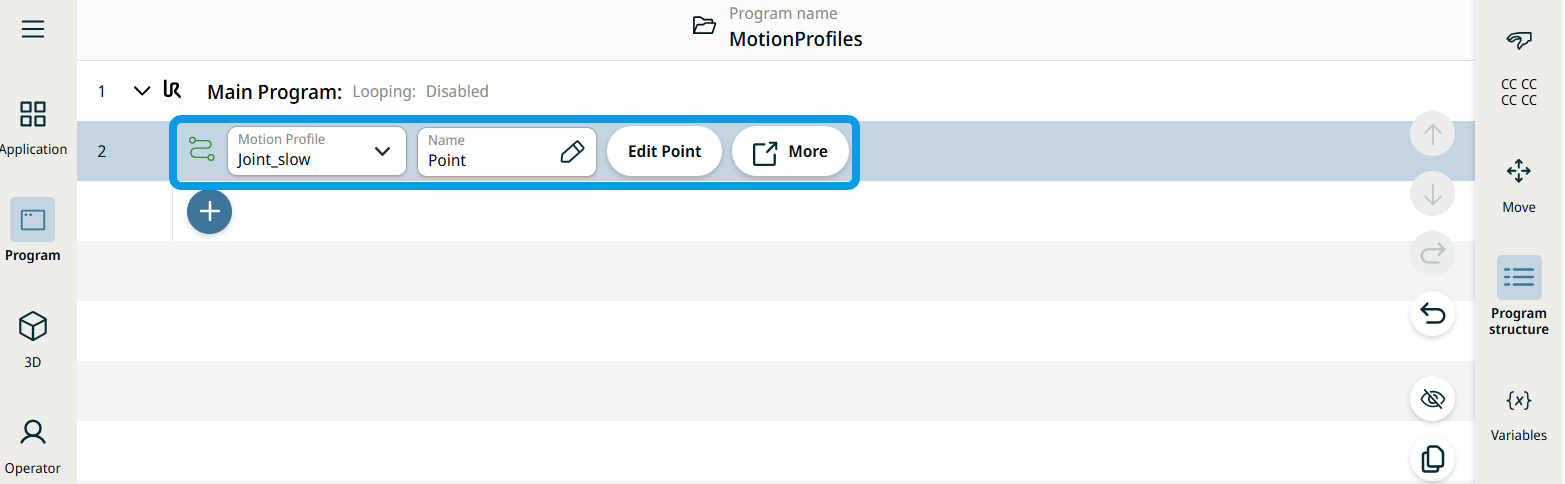
To access Joint Move command |
|
|
|
|
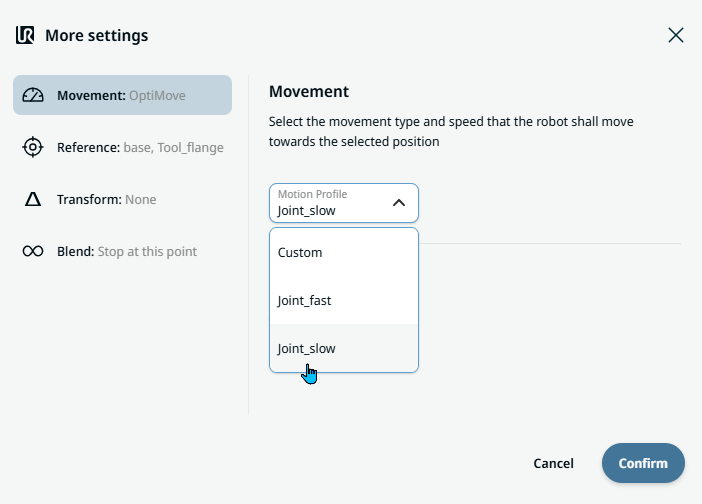
| Movement setting |
|
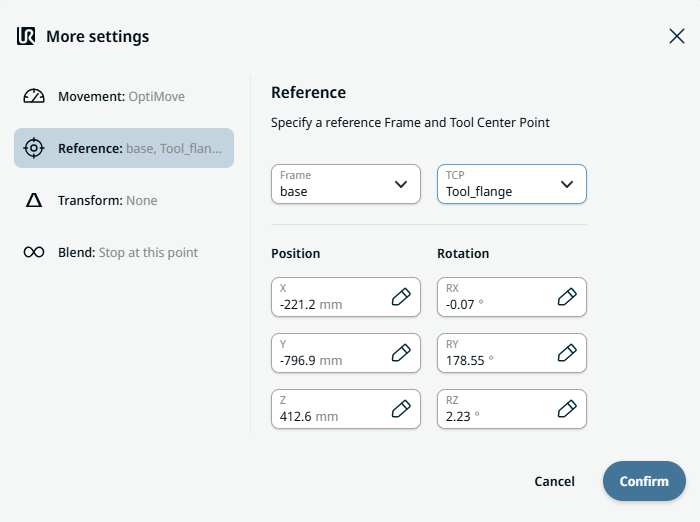
| Reference setting |
|
| Transform setting |
|
|
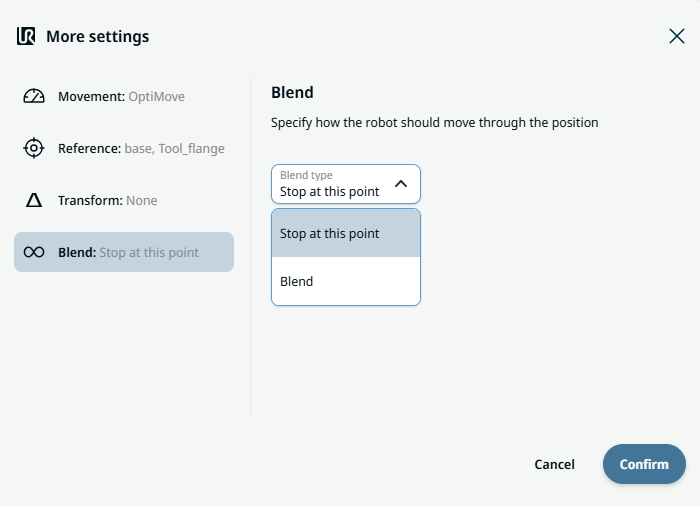
Blend setting |
|