Roboterarm
| Der Roboterarm |
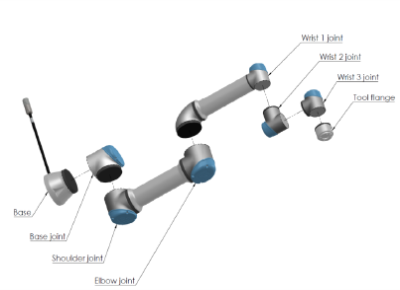
Die Gelenke, die Basis und der Werkzeugflansch sind die Hauptkomponenten des Roboterarms. Der Controller koordiniert die Gelenkbewegungen, um den Roboterarm zu bewegen.
Wenn Sie einen Endeffektor (Werkzeug) am Werkzeugflansch am Ende des Roboterarms anbringen, kann der Roboter ein Werkstück manipulieren. Einige Werkzeuge haben einen speziellen Zweck, der über die Manipulation eines Teils hinausgeht, z. B. QC-Inspektion, Auftragen von Klebstoffen und Schweißen. |
|
Bei dem Roboter handelt es sich um eine unvollständige Maschine, für die eine Einbauerklärung bereitgestellt wird. Für jede Roboteranwendung ist eine Risikobeurteilung erforderlich.
|