|
Der Roboter startet am Wegpunkt 1 (WP_1) und muss am Wegpunkt 3 (WP_3) ein Objekt aufnehmen.
Um Kollisionen mit dem Objekt und anderen Hindernissen zu vermeiden, muss der Roboter (O) ausweichen, indem er Wegpunkt 2 (WP_2) verwendet.
Es werden drei Wegpunkte eingeführt, um eine Bahn zu erstellen, die die Anforderungen erfüllt.
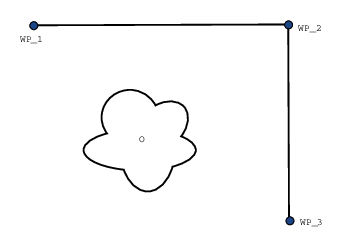
46.4: (WP_1): Ausgangsposition, (WP_2): Durchgangspunkt, (WP_3): Aufnahmeposition, (O): Hindernis.
Ohne die Konfiguration weiterer Einstellungen führt der Roboter an jedem Wegpunkt einen kurzen Stopp aus, bevor er seinen Bewegungsablauf fortsetzt.
Für diese Aufgabenstellung ist ein Stopp bei (WP_2) nicht erwünscht,
da mit einer reibungslosen Bewegung Zeit und Energie eingespart und die Anforderungen dennoch erfüllt werden. Es ist sogar zulässig, dass der Roboter (WP_2) nicht genau erreicht,
solange der Übergang von der ersten zur zweiten Bahn nahe dieser Position stattfindet.
Der Stopp bei (WP_2) kann vermieden werden, indem Sie für den Wegpunkt Blending konfigurieren.
So kann der Roboter einen sanften Übergang in die nächste Bahn berechnen.
Der primäre Parameter für das Blending ist ein Radius.
Wenn sich der Roboter innerhalb des Blending-Radius des Wegpunktes befindet, kann er von der ursprünglichen Bahn abweichen. Dies ermöglicht schnellere und gleichmäßigere Bewegungen, da der Roboter weder abbremsen noch beschleunigen muss.
|