Bemessung des Ständers
| Beschreibung |
Die Struktur (Ständer), auf der der Roboterarm montiert wird, ist ein entscheidender Teil der Roboterinstallation. Der Ständer muss stabil sein und darf keine Vibrationen von außen erfahren.
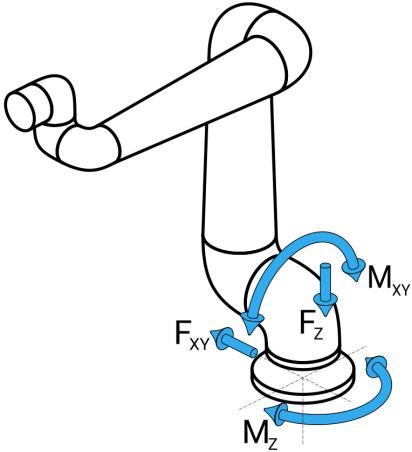
Jedes Robotergelenk erzeugt ein Drehmoment, das den Roboterarm bewegt und anhält. Während des normalen, ununterbrochenen Betriebs und während der Stoppbewegung werden die Drehmomente der Gelenke wie folgt auf den Roboterständer übertragen:
Definition von Kraft und Drehmoment am Basisflansch. |
|
Bemessung des Ständers |
Das Ausmaß der Belastungen hängt vom Robotermodell, dem Programm und vielen anderen Faktoren ab. Bei der Dimensionierung des Ständers müssen die Lasten berücksichtigt werden, die der Roboterarm bei normalem, ununterbrochenem Betrieb und bei Stoppbewegungen der Kategorien 0, 1 und 2 erzeugt.
Während der Stoppbewegung dürfen die Gelenke das maximale Nennbetriebsdrehmoment überschreiten. Die Belastung während der Stoppbewegung ist unabhängig von der Art der Stoppkategorie. Bei den in den folgenden Tabellen angegebenen Werten handelt es sich um maximale Nennlasten bei Bewegungen im ungünstigsten Fall, multipliziert mit einem Sicherheitsfaktor von 2,5. Die tatsächlichen Belastungen werden diese Werte nicht überschreiten.
Maximale Gelenkdrehmomente bei Stopps der Kategorien 0, 1 und 2.
Maximale Gelenkdrehmomente bei normalem Betrieb.
Die normalen Betriebslasten können im Allgemeinen durch Herabsetzung der Beschleunigungsgrenzen der Gelenke reduziert werden. Die tatsächliche Betriebslast hängt von der Anwendung und dem Roboterprogramm ab. Sie können URSim verwenden, um die zu erwartenden Belastungen in Ihrer spezifischen Anwendung zu bewerten. |
Sicherheitsabstände |
Sie haben die Möglichkeit, zusätzliche Sicherheitsabstände einzubauen, indem Sie die folgenden Überlegungen bei der Konstruktion berücksichtigen:
|