PROFIsafe
| Beschreibung |
Das Netzwerkprotokoll PROFIsafe (als Version 2.6.1 implementiert) ermöglicht dem Roboter die Kommunikation mit einer Sicherheits-SPS gemäß PLd-Kategorie-3-Anforderungen in ISO 13849. Der Roboter übermittelt Informationen zum Sicherheitsstatus an eine Sicherheits-SPS und empfängt dann Informationen zur Reduzierung oder zum Auslösen einer sicherheitsrelevanten Funktion wie eine Notabschaltung. Die PROFIsafe-Schnittstelle bietet eine sichere, netzwerkbasierte Alternative zum Anschluss von Kabeln an die Sicherheits-E/A-Pins der Robotersteuerbox. PROFIsafe ist nur auf Robotern verfügbar, die über eine Aktivierungslizenz verfügen, die Sie von Ihrem lokalen Vertriebsmitarbeiter erhalten. Sobald Sie die Lizenz erhalten haben, können Sie diese bei myUR herunterladen. Informationen zur Roboterregistrierung und Lizenzaktivierung finden Sie unter Roboter-Registrierung und Lizenzdatei .
|
| Erweiterte Optionen |
Eine Statusmeldung, die an die Sicherheits-SPS gesendet wird, enthält die Informationen in der folgenden Tabelle.
|
||||||||||||||||
| Erweiterte Optionen |
|
| Erweiterte Optionen |
|
| PROFIsafe konfigurieren |
Die Konfiguration von PROFIsafe bezieht sich auf die Programmierung der Sicherheits-SPS, erfordert jedoch ein minimales Roboter-Setup.
|
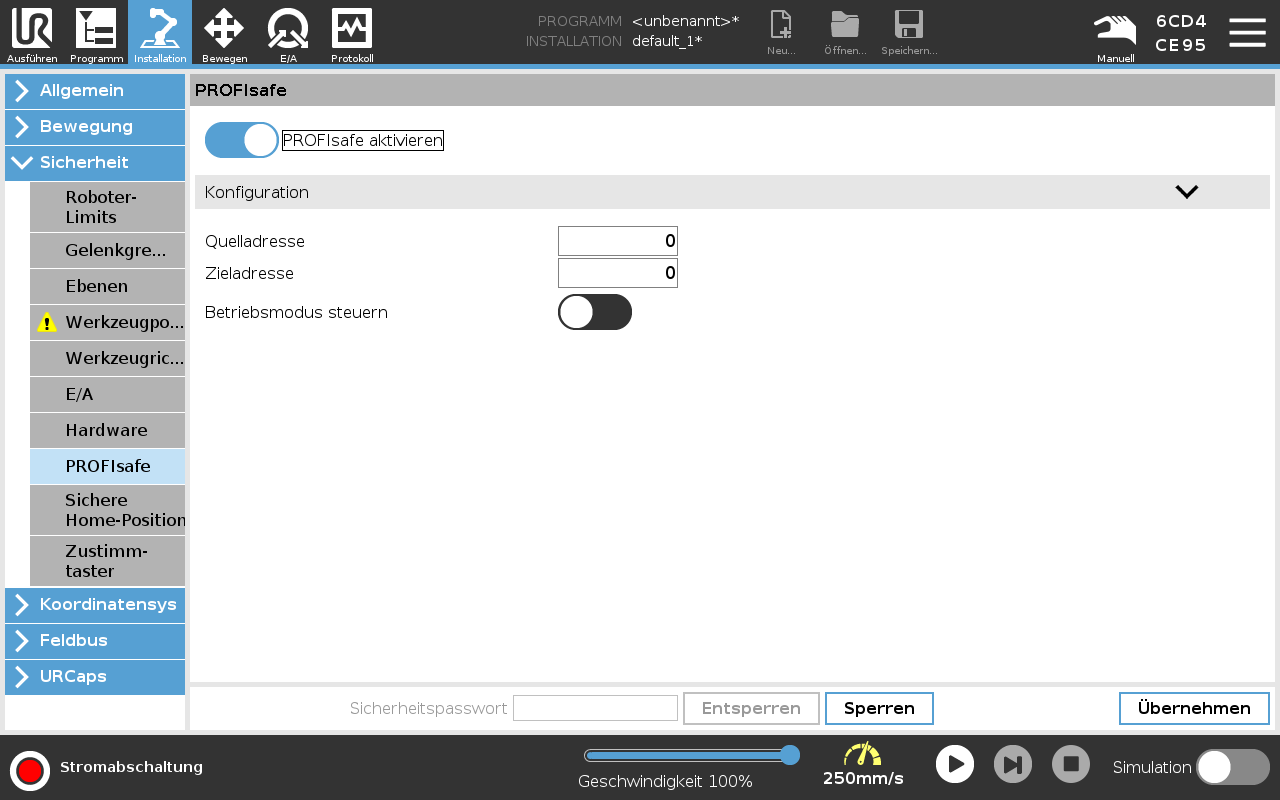
| Aktivieren von PROFIsafe |
Der Roboter ist nun für die Kommunikation mit einer Sicherheits-SPS eingerichtet. Sie können die Bremsen des Roboters nicht lösen, wenn die SPS nicht reagiert oder falsch konfiguriert ist.
|