OptiMove
| Beschreibung |
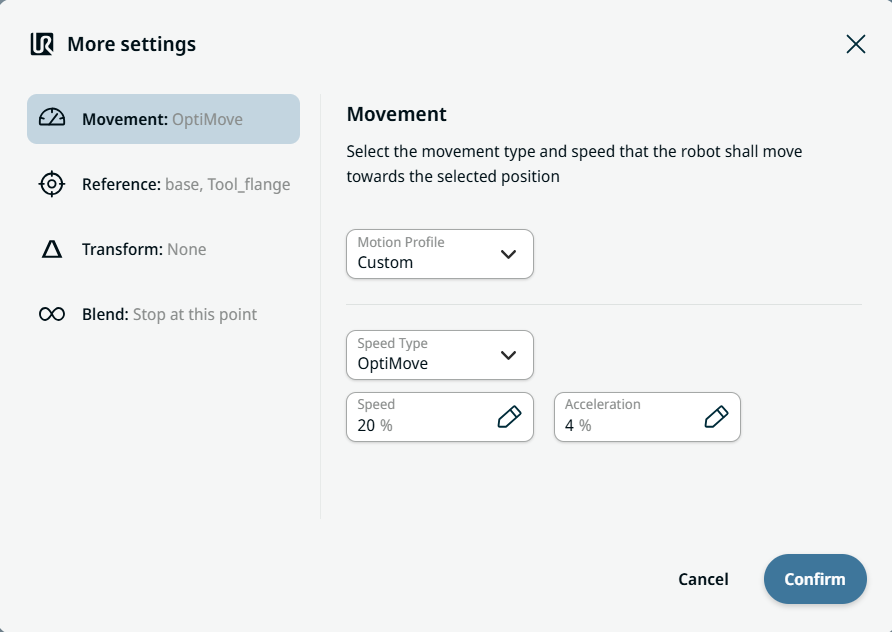
Der OptiMove- -Bewegungswert ist eine erweiterte Funktion der PolyScope X- -Befehle für Gelenk- und Linearbewegungen. Siehe Gelenkbewegung und Lineare Bewegung.
Mit der OptiMove- profitieren Sie von folgenden Vorteilen:
Die kombinierte Wirkung von „ “ und „OptiMove“ führt im Allgemeinen zu einer verkürzten Zykluszeit mit flüssigeren Bewegungen und einer geringeren Belastung des Roboters.
|
|
So greifen Sie auf OptiMove zu |
|
|
|
|
|
|
|

 .
.