Roboter-Limits
| Beschreibung |
Robotergrenzen beschränken generelle Roboterbewegungen.
Die Sicherheitsbegrenzungen schränken die Kräfte und Bewegungen am Werkzeugflansch und dem Mittelpunkt zwischen den zwei benutzerdefinierten Werkzeugpositionen ein
|
| Geschwindigkeitsgrenzen | 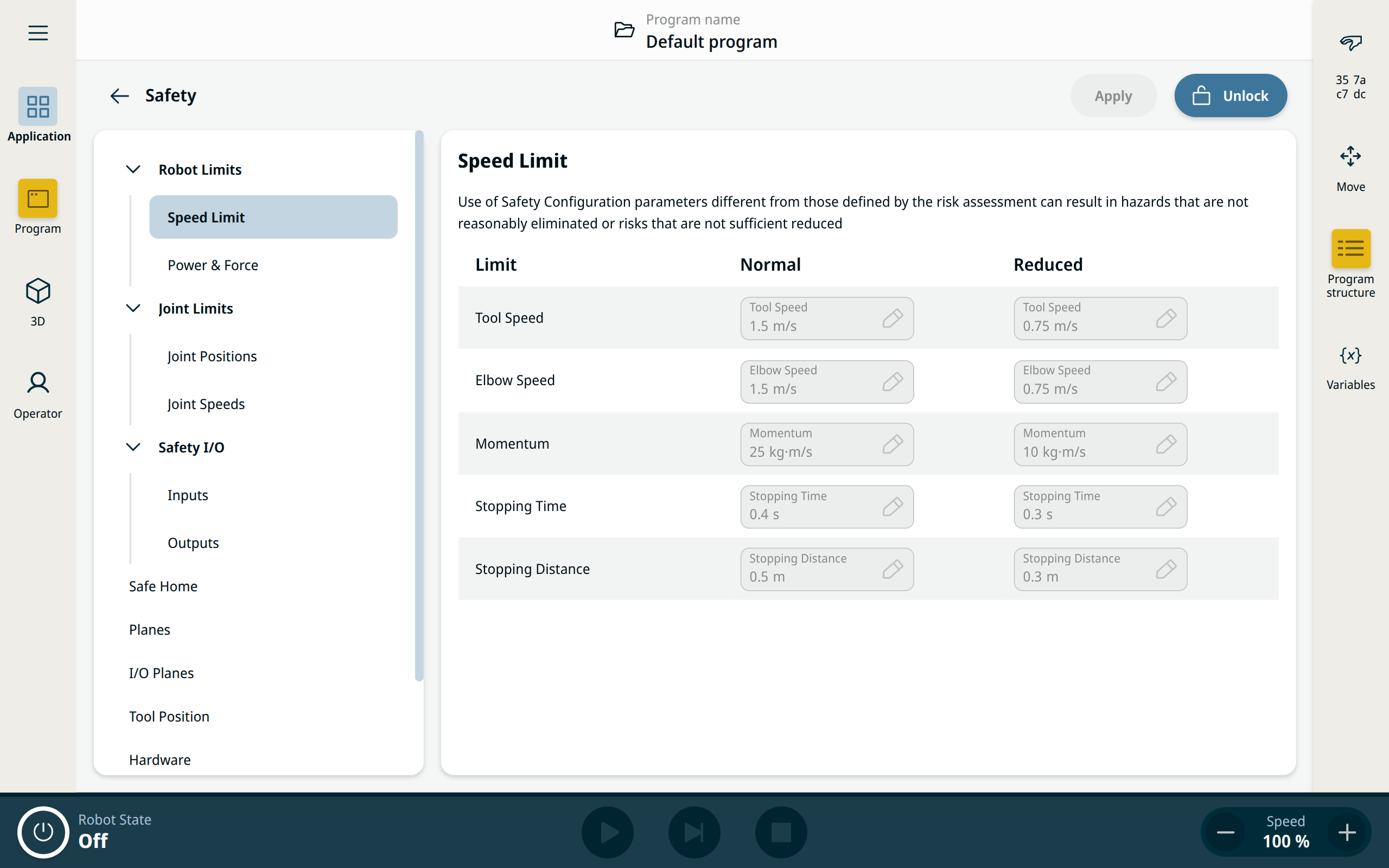
Die Begrenzung der Stoppzeit und des Abstands wirkt sich auf die Gesamtgeschwindigkeit des Roboters aus. Wenn beispielsweise die Stoppzeit auf 300 ms eingestellt ist, wird die maximale Robotergeschwindigkeit begrenzt, sodass der Roboter innerhalb von 300 ms anhalten kann.
|
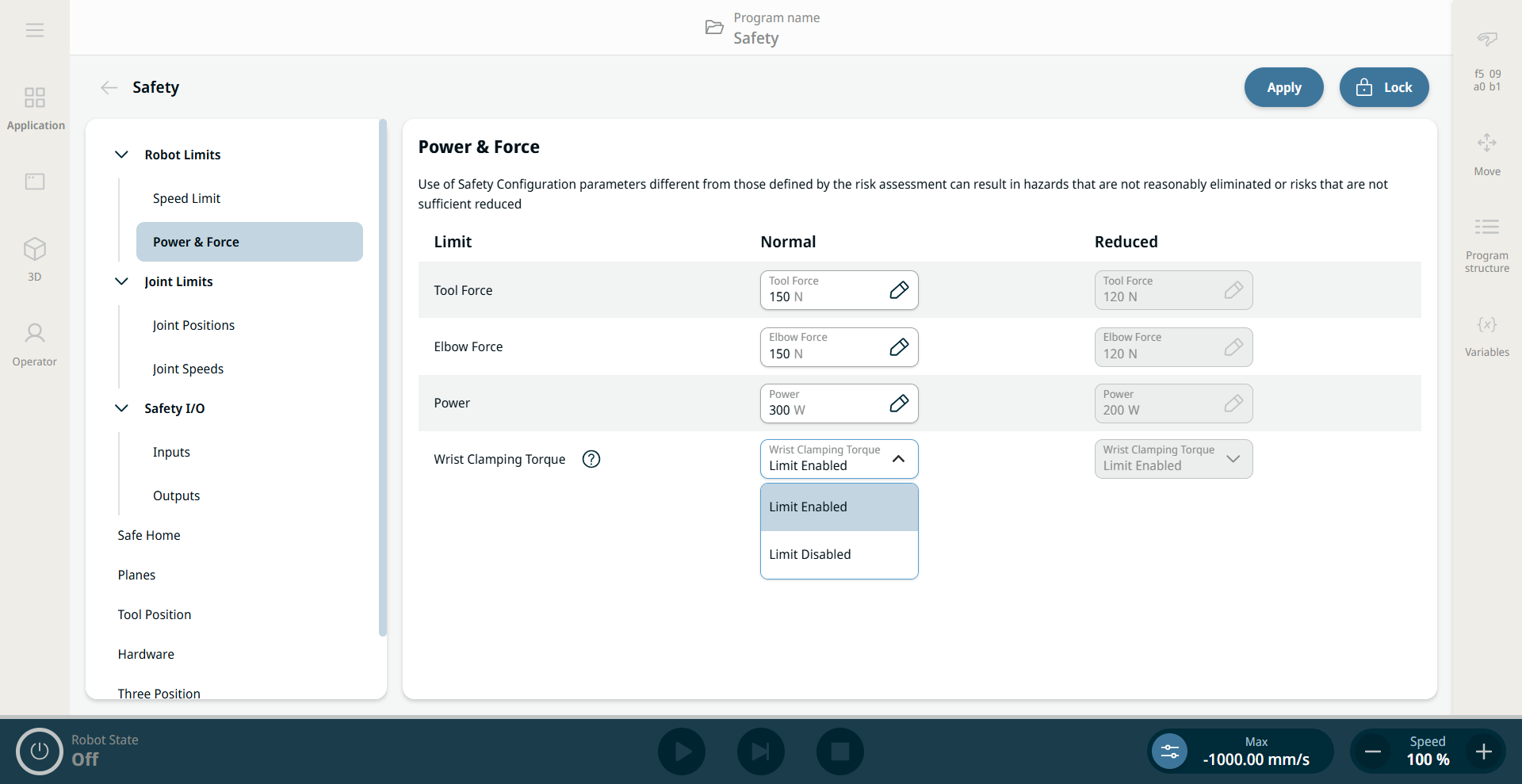
| Leistung und Kraft |
Die Werkzeug- oder Ellbogen-Kräfte können von den drei Handgelenken überschritten werden, falls die Sicherheitsfunktion „Klemmdrehmoment des Handgelenks“ deaktiviert ist
|